Domain Adaptation: Image to image translation, Gradient Reversal Layer, Adversarial Domain Adaptation
Contents
In questo laboratorio, vedremo alcuni metodi di domain adaptation basati su deep learning.
Imposiamo i seed per riproducilibilità:
import torch
import random
import numpy as np
np.random.seed(0)
torch.manual_seed(0)
random.seed(0)
1 Image to Image translation con CycleGAN - Pixel-level Domain Adaptation
Il primo metodo di domain adaptation che vediamo in questo laboratorio è pensato per lavorare su immagini ed effettua l’adattamento al livello dei pixel. L’approccio che vediamo qui assume che siano disponibili delle immagini appartenenti al dominio A e delle immagini appartenenti al dominio B, ma che tali esempi siano non accoppiati. L’approccio che vedremo si chiama CycleGAN e si basa sul principio della cycle consistency loss. Si faccia riferimento a https://arxiv.org/abs/1703.10593 per la pubblicazione ufficiale.
L’obiettivo di CycleGAN è quello di trasformare una immagine appartentente a un dominio di partenza in una immagine dal lo stesso contenuto, ma che possa essere “scambiata” per una immagine appartenente a un dominio di destinazione. Per fare ciò, l’algoritmo trasformerà l’immagine cambiandone solo lo stile. Esempi di trasformazioni tra due domini sono mostrati di seguito:
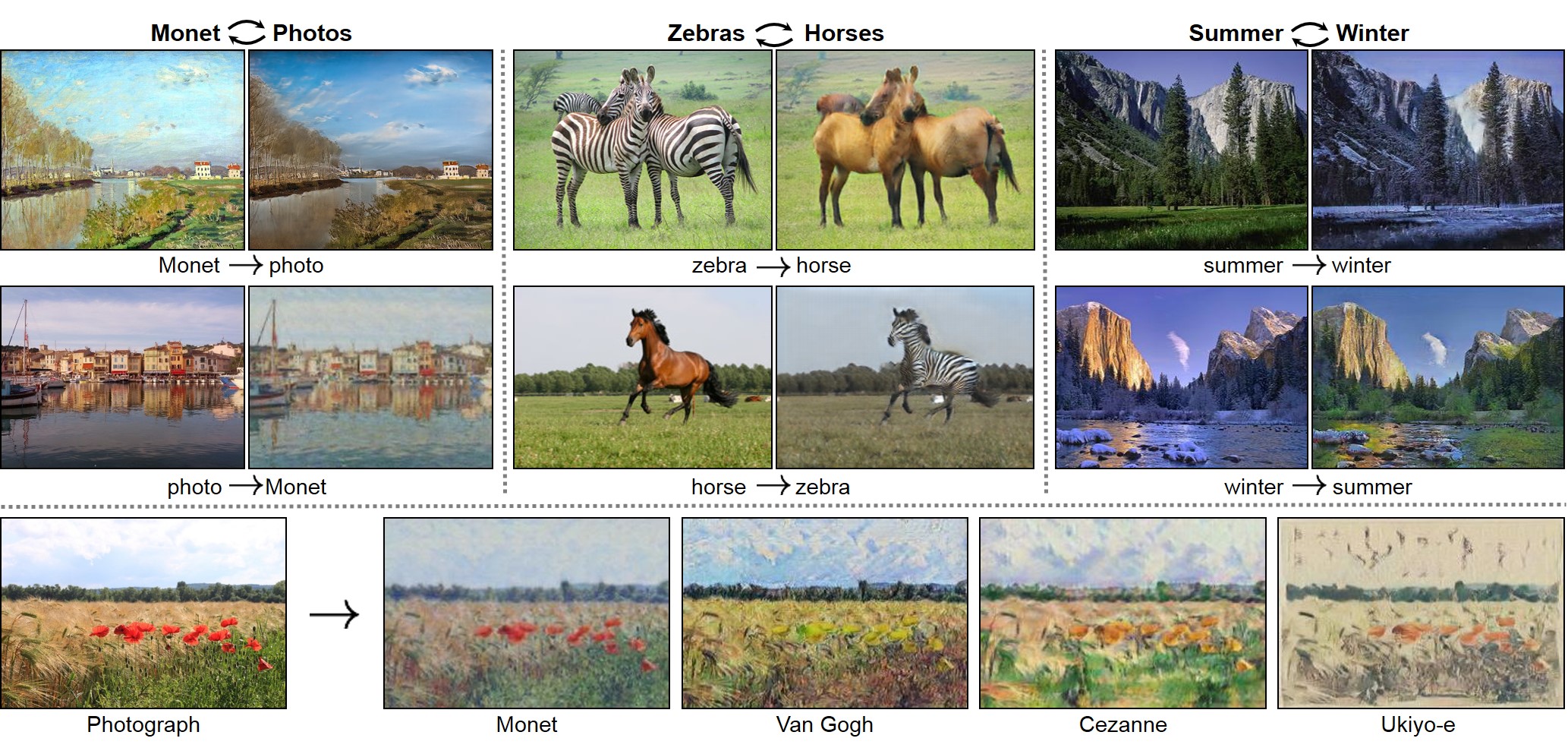
Immagine da: https://junyanz.github.io/CycleGAN/
Il modello che effettuerà la trasformazione si basa su due insiemi di immagini appartenenti ai due domini A e B. Si assumerà che le immagini sono “disaccoppiate”, il che vuol dire che a una data immagine di A non corrisponderà una specifica immagine di B in termini di contenuto.
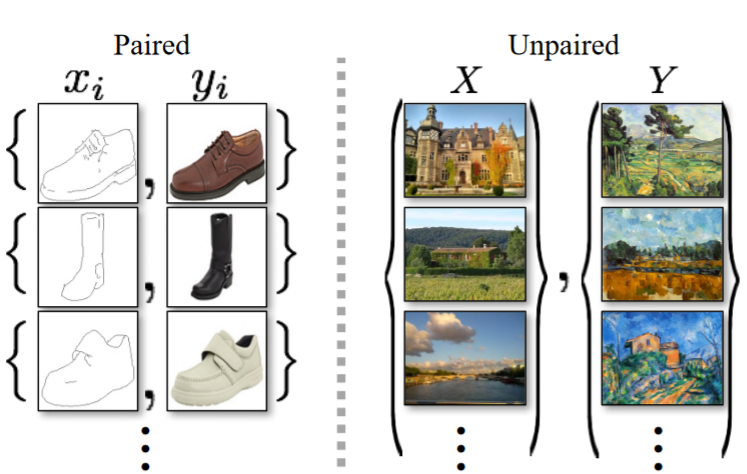
Immagine da https://arxiv.org/pdf/1703.10593.pdf
 | Domanda 1 Perché CycleGAN assume che le immagini dei due domini sono non accoppiate? Qual è il vantaggio? Quali sono le limitazioni? |
Per effettuare il training sotto queste condizioni, vengono usati due moduli, uno che trasforma le immagini dal dominio A al dominio B e uno che trasforma le immagini dal dominio B al dominio A. Questi due moduli sono detti “generatori” in analogia con le GAN. Vengono dunque usati due discriminatori per assicurarci che le immagini generate siano indistinguibili da quelle effettivamente appartenenti ai due domini. Per gestire il caso di immagini non accoppiati, viene utilizzata la cycle consistency loss che incoraggia il modello a far si che una immagine trasformata da A a B e poi nuovamente in A sia coerente con l’immagine di partenza.
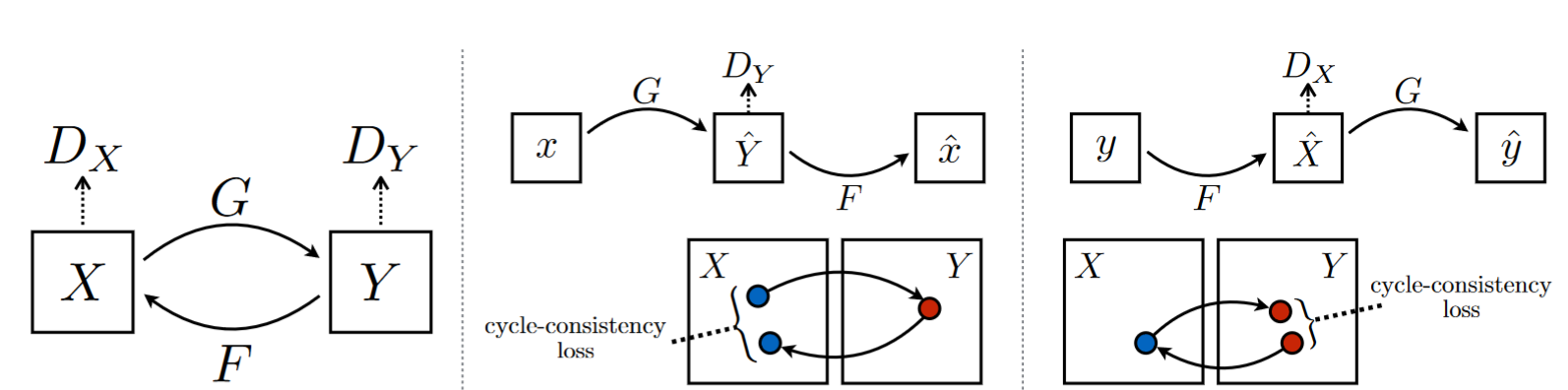
Immagine da https://arxiv.org/pdf/1703.10593.pdf
In questo laboratorio, faremo riferimento all’implementazione in PyTorch disponibile al link che segue, ma ne riproporremo una implementazione basata su PyTorch Lightning: https://github.com/aitorzip/PyTorch-CycleGAN.
1.1 Dati
Per i nostri esperimenti, considereremo un semplice dataset di immagini non accoppiate appartenenti a due domini: “Russian Blue Cat” e “Grumpy Cat”. Scarichiamo il dataset dal sito degli autori di CycleGAN mediante il comando:
wget https://people.eecs.berkeley.edu/~taesung_park/CycleGAN/datasets/grumpifycat.zip
Estraiamo adesso le immagini dall’archivio con:
unzip grumpifycat.zip
Dovremmo adesso trovare una cartella grumpifycat con le sottocartelle trainA e trainB.
Per caricare il dataset ed accedere alle immagini, definiamo una classe ImageDataset:
import glob
import random
import os
from torch.utils.data import Dataset
from PIL import Image
import torchvision.transforms as transforms
class ImageDataset(Dataset):
def __init__(self, root, transform=None, mode='train'):
self.transform = transform #conserva la transform
# ottieni i path delle immagini in A e B
self.files_A = sorted(glob.glob(os.path.join(root, '%sA' % mode) + '/*.*'))
self.files_B = sorted(glob.glob(os.path.join(root, '%sB' % mode) + '/*.*'))
def __getitem__(self, index):
#apro l'iesima immagine A (uso il modulo per evitare di sforare)
item_A = Image.open(self.files_A[index % len(self.files_A)])
#apro una immagine B a caso
item_B = Image.open(self.files_B[random.randint(0, len(self.files_B) - 1)])
if self.transform:
item_A = self.transform(item_A)
item_B = self.transform(item_B)
return item_A, item_B
def __len__(self):
return max(len(self.files_A), len(self.files_B))
Possiamo adesso definire l’oggetto dataset e caricare come segue:
dset = ImageDataset('grumpifycat')
Visualizzimo quindi una coppia di immagini:
from matplotlib import pyplot as plt
import numpy as np
plt.figure(figsize=(12,8))
plt.subplot(121)
plt.imshow(np.array(dset[300][0]))
plt.axis('off')
plt.subplot(122)
plt.imshow(np.array(dset[300][1]))
plt.axis('off')
plt.show()

| Domanda 2 Si confrontino le immagini ottenute. Sono accoppiate o no? Cosa succede se provo a ottenere e visualizzare due volte la stessa coppia? |
1.2 Implementazione
Definiamo i modelli che utilizzeremo per costruire la rete CycleGAN, ovvero il generatore e il discriminatore. Iniziamo definendo il ResidualBlock, alla base del generatore:
import torch.nn as nn
import torch.nn.functional as F
class ResidualBlock(nn.Module):
def __init__(self, in_features):
super(ResidualBlock, self).__init__()
# Il blocco segue la struttura di un classico residual block di ResNet
conv_block = [ nn.ReflectionPad2d(1), # Il ReflectionPad fa padding usando una versione "specchiata" del bordo dell'immagine
nn.Conv2d(in_features, in_features, 3),
nn.InstanceNorm2d(in_features), # Instance normalization, un tipo di normalizzazione simile a batch normalization spesso usato per style transfer
nn.ReLU(inplace=True),
nn.ReflectionPad2d(1),
nn.Conv2d(in_features, in_features, 3),
nn.InstanceNorm2d(in_features) ]
self.conv_block = nn.Sequential(*conv_block)
def forward(self, x):
# La forward applica il blocco e somma l'input per ottenere una connessione residua
return x + self.conv_block(x)
Definiamo dunque il generatore basato sui blocchi residui:
class Generator(nn.Module):
def __init__(self, input_nc, output_nc, n_residual_blocks=9):
super(Generator, self).__init__()
# Blocco di convoluzioni iniziale che mappa l'input su 64 feature maps
model = [ nn.ReflectionPad2d(3),
nn.Conv2d(input_nc, 64, 7),
nn.InstanceNorm2d(64),
nn.ReLU(inplace=True) ]
# ============ Encoder ============
# Due blocchi che mappano l'input
# da 64 a 128 e da 128 a 256 mappe
in_features = 64
out_features = in_features*2
for _ in range(2):
model += [ nn.Conv2d(in_features, out_features, 3, stride=2, padding=1),
nn.InstanceNorm2d(out_features),
nn.ReLU(inplace=True) ]
in_features = out_features
out_features = in_features*2
# Aggiungiamo dunque i residual blocks
for _ in range(n_residual_blocks):
model += [ResidualBlock(in_features)]
# ============ Decoder =============
# Due blocchi di convoluzione
out_features = in_features//2
for _ in range(2):
# Qui usiamo la convoluzione trasposta (https://github.com/vdumoulin/conv_arithmetic/blob/master/README.md)
# che fa upsampling piuttosto che downsampling quando si impostano stride e padding
model += [ nn.ConvTranspose2d(in_features, out_features, 3, stride=2, padding=1, output_padding=1),
nn.InstanceNorm2d(out_features),
nn.ReLU(inplace=True) ]
in_features = out_features
out_features = in_features//2
# Layer finale di output
model += [ nn.ReflectionPad2d(3),
nn.Conv2d(64, output_nc, 7),
nn.Tanh() ]
# Inizializziamo l'oggetto sequential con la lista dei moduli
self.model = nn.Sequential(*model)
def forward(self, x):
return self.model(x)
Possiamo analizzare le dimensioni delle feature map intermedie del modello mediante la libreria torchsummary, che possiamo installare con il comando:
pip install torchsummary
Vediamo quali sono le dimensioni intermedie delle feature map con un input di dimensioni $3 \times 224 \times 224$:
from torchsummary import summary
gen = Generator(3,3).cuda()
summary(gen, (3,224,224))
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
ReflectionPad2d-1 [-1, 3, 230, 230] 0
Conv2d-2 [-1, 64, 224, 224] 9,472
InstanceNorm2d-3 [-1, 64, 224, 224] 0
ReLU-4 [-1, 64, 224, 224] 0
Conv2d-5 [-1, 128, 112, 112] 73,856
InstanceNorm2d-6 [-1, 128, 112, 112] 0
ReLU-7 [-1, 128, 112, 112] 0
Conv2d-8 [-1, 256, 56, 56] 295,168
InstanceNorm2d-9 [-1, 256, 56, 56] 0
ReLU-10 [-1, 256, 56, 56] 0
ReflectionPad2d-11 [-1, 256, 58, 58] 0
Conv2d-12 [-1, 256, 56, 56] 590,080
InstanceNorm2d-13 [-1, 256, 56, 56] 0
ReLU-14 [-1, 256, 56, 56] 0
ReflectionPad2d-15 [-1, 256, 58, 58] 0
Conv2d-16 [-1, 256, 56, 56] 590,080
InstanceNorm2d-17 [-1, 256, 56, 56] 0
ResidualBlock-18 [-1, 256, 56, 56] 0
ReflectionPad2d-19 [-1, 256, 58, 58] 0
Conv2d-20 [-1, 256, 56, 56] 590,080
InstanceNorm2d-21 [-1, 256, 56, 56] 0
ReLU-22 [-1, 256, 56, 56] 0
ReflectionPad2d-23 [-1, 256, 58, 58] 0
Conv2d-24 [-1, 256, 56, 56] 590,080
InstanceNorm2d-25 [-1, 256, 56, 56] 0
ResidualBlock-26 [-1, 256, 56, 56] 0
ReflectionPad2d-27 [-1, 256, 58, 58] 0
Conv2d-28 [-1, 256, 56, 56] 590,080
InstanceNorm2d-29 [-1, 256, 56, 56] 0
ReLU-30 [-1, 256, 56, 56] 0
ReflectionPad2d-31 [-1, 256, 58, 58] 0
Conv2d-32 [-1, 256, 56, 56] 590,080
InstanceNorm2d-33 [-1, 256, 56, 56] 0
ResidualBlock-34 [-1, 256, 56, 56] 0
ReflectionPad2d-35 [-1, 256, 58, 58] 0
Conv2d-36 [-1, 256, 56, 56] 590,080
InstanceNorm2d-37 [-1, 256, 56, 56] 0
ReLU-38 [-1, 256, 56, 56] 0
ReflectionPad2d-39 [-1, 256, 58, 58] 0
Conv2d-40 [-1, 256, 56, 56] 590,080
InstanceNorm2d-41 [-1, 256, 56, 56] 0
ResidualBlock-42 [-1, 256, 56, 56] 0
ReflectionPad2d-43 [-1, 256, 58, 58] 0
Conv2d-44 [-1, 256, 56, 56] 590,080
InstanceNorm2d-45 [-1, 256, 56, 56] 0
ReLU-46 [-1, 256, 56, 56] 0
ReflectionPad2d-47 [-1, 256, 58, 58] 0
Conv2d-48 [-1, 256, 56, 56] 590,080
InstanceNorm2d-49 [-1, 256, 56, 56] 0
ResidualBlock-50 [-1, 256, 56, 56] 0
ReflectionPad2d-51 [-1, 256, 58, 58] 0
Conv2d-52 [-1, 256, 56, 56] 590,080
InstanceNorm2d-53 [-1, 256, 56, 56] 0
ReLU-54 [-1, 256, 56, 56] 0
ReflectionPad2d-55 [-1, 256, 58, 58] 0
Conv2d-56 [-1, 256, 56, 56] 590,080
InstanceNorm2d-57 [-1, 256, 56, 56] 0
ResidualBlock-58 [-1, 256, 56, 56] 0
ReflectionPad2d-59 [-1, 256, 58, 58] 0
Conv2d-60 [-1, 256, 56, 56] 590,080
InstanceNorm2d-61 [-1, 256, 56, 56] 0
ReLU-62 [-1, 256, 56, 56] 0
ReflectionPad2d-63 [-1, 256, 58, 58] 0
Conv2d-64 [-1, 256, 56, 56] 590,080
InstanceNorm2d-65 [-1, 256, 56, 56] 0
ResidualBlock-66 [-1, 256, 56, 56] 0
ReflectionPad2d-67 [-1, 256, 58, 58] 0
Conv2d-68 [-1, 256, 56, 56] 590,080
InstanceNorm2d-69 [-1, 256, 56, 56] 0
ReLU-70 [-1, 256, 56, 56] 0
ReflectionPad2d-71 [-1, 256, 58, 58] 0
Conv2d-72 [-1, 256, 56, 56] 590,080
InstanceNorm2d-73 [-1, 256, 56, 56] 0
ResidualBlock-74 [-1, 256, 56, 56] 0
ReflectionPad2d-75 [-1, 256, 58, 58] 0
Conv2d-76 [-1, 256, 56, 56] 590,080
InstanceNorm2d-77 [-1, 256, 56, 56] 0
ReLU-78 [-1, 256, 56, 56] 0
ReflectionPad2d-79 [-1, 256, 58, 58] 0
Conv2d-80 [-1, 256, 56, 56] 590,080
InstanceNorm2d-81 [-1, 256, 56, 56] 0
ResidualBlock-82 [-1, 256, 56, 56] 0
ConvTranspose2d-83 [-1, 128, 112, 112] 295,040
InstanceNorm2d-84 [-1, 128, 112, 112] 0
ReLU-85 [-1, 128, 112, 112] 0
ConvTranspose2d-86 [-1, 64, 224, 224] 73,792
InstanceNorm2d-87 [-1, 64, 224, 224] 0
ReLU-88 [-1, 64, 224, 224] 0
ReflectionPad2d-89 [-1, 64, 230, 230] 0
Conv2d-90 [-1, 3, 224, 224] 9,411
Tanh-91 [-1, 3, 224, 224] 0
================================================================
Total params: 11,378,179
Trainable params: 11,378,179
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.57
Forward/backward pass size (MB): 717.23
Params size (MB): 43.40
Estimated Total Size (MB): 761.21
----------------------------------------------------------------
| Domanda 3 Quale modello visto negli scorsi laboratori ricorda il generatore qui definito? Quali sono le differenze tra i due modelli? |
Come possiamo vedere dal summary sopra, il modello è composto di due parti: un encoder con diversi residual block e un decoder con alcuni blocchi di convoluzioni. L’encoder effettua downsampling dell’immagine, mentre il decoder effettua un upsampling per restituire una immagine delle stesse dimensioni dell’input.
Costruiamo quindi il decoder:
class Discriminator(nn.Module):
def __init__(self, input_nc):
super(Discriminator, self).__init__()
# Diversi layer di convoluzione. In questo caso usiamo le LeakyReLU invece delle ReLU
model = [ nn.Conv2d(input_nc, 64, 4, stride=2, padding=1),
nn.LeakyReLU(0.2, inplace=True) ]
model += [ nn.Conv2d(64, 128, 4, stride=2, padding=1),
nn.InstanceNorm2d(128),
nn.LeakyReLU(0.2, inplace=True) ]
model += [ nn.Conv2d(128, 256, 4, stride=2, padding=1),
nn.InstanceNorm2d(256),
nn.LeakyReLU(0.2, inplace=True) ]
model += [ nn.Conv2d(256, 512, 4, padding=1),
nn.InstanceNorm2d(512),
nn.LeakyReLU(0.2, inplace=True) ]
# Layer di classificazione
model += [nn.Conv2d(512, 1, 4, padding=1)]
self.model = nn.Sequential(*model)
def forward(self, x):
x = self.model(x)
# Average pooling
return F.avg_pool2d(x, x.size()[2:]).view(x.size()[0], -1)
Possiamo visualizzare anche in questo caso le dimensioni delle mappe intermedie con torchsummary:
from torchsummary import summary
disc = Discriminator(3).cuda()
summary(disc, (3,224,224))
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 64, 112, 112] 3,136
LeakyReLU-2 [-1, 64, 112, 112] 0
Conv2d-3 [-1, 128, 56, 56] 131,200
InstanceNorm2d-4 [-1, 128, 56, 56] 0
LeakyReLU-5 [-1, 128, 56, 56] 0
Conv2d-6 [-1, 256, 28, 28] 524,544
InstanceNorm2d-7 [-1, 256, 28, 28] 0
LeakyReLU-8 [-1, 256, 28, 28] 0
Conv2d-9 [-1, 512, 27, 27] 2,097,664
InstanceNorm2d-10 [-1, 512, 27, 27] 0
LeakyReLU-11 [-1, 512, 27, 27] 0
Conv2d-12 [-1, 1, 26, 26] 8,193
================================================================
Total params: 2,764,737
Trainable params: 2,764,737
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.57
Forward/backward pass size (MB): 34.58
Params size (MB): 10.55
Estimated Total Size (MB): 45.70
----------------------------------------------------------------
Il discriminatore riduce la dimensionalità dell’input aumentando il numero di mappe. Notiamo comunque che l’output è un numero reale (il logit):
disc(torch.zeros(1,3,224,224).cuda()).shape
torch.Size([1, 1])
Durante il training, ci servirà uno scheduler per controllare l’andamento del learning rate. Definiamone uno ad hoc che permetta di far decadere il learning rate dopo le prime decay_start_epoch epoche:
class LambdaLR():
def __init__(self, n_epochs, offset, decay_start_epoch):
assert ((n_epochs - decay_start_epoch) > 0), "Decay must start before the training session ends!"
self.n_epochs = n_epochs
self.offset = offset
self.decay_start_epoch = decay_start_epoch
def step(self, epoch):
return 1.0 - max(0, epoch + self.offset - self.decay_start_epoch)/(self.n_epochs - self.decay_start_epoch)
Definiamo adesso una funzione per inizializzare i layer dei moduli definiti:
def weights_init_normal(m):
classname = m.__class__.__name__
# Inizializziamo le convoluzioni con rumore gaussiano
# di media zero e deviazione standard 0.02
if classname.find('Conv') != -1:
m.weight.data.normal_(0.0, 0.02)
# Nel caso della batchnorm2d useremo media 1 e deviazione standard 0.02
elif classname.find('BatchNorm2d') != -1:
m.weight.data.normal_(1.0, 0.02)
# il bias è costante e pari a zero
m.bias.data.fill_(0.0)
Abbiamo definito i moduli che implementano i vari componenti di CycleGAN come moduli di PyTorch (e non Lightning). Definiremo adesso un modulo di Lightning che definisca solo come effettuare il training:
import pytorch_lightning as pl
import itertools
from torch.utils.data import DataLoader
import torchvision
class CycleGAN(pl.LightningModule):
def __init__(self,
input_nc = 3, # numero di canali in input
output_nc = 3, # numero di canali in output
image_size = 256, # la dimensione dell'immagine
lr=0.0002, # learning rate
betas=(0.5, 0.999), # valori beta di Adam
starting_epoch=0, # epoca di partenza (0 se non stiamo facendo resume di un training interrotto)
n_epochs=200, # numero totale di epoche
decay_epoch=100, # epoca dopo la quale iniziare a far scendere il learning rate
data_root = 'grumpifycat', #cartella in cui si trovano i dati
batch_size = 1, #batch size
n_cpu = 8 # numeri di thread per il dataloader
):
super(CycleGAN, self).__init__()
self.save_hyperparameters()
# Definiamo due generatori: da A a B e da B ad A
self.netG_A2B = Generator(input_nc, output_nc)
self.netG_B2A = Generator(output_nc, input_nc)
# Definiamo due discriminatori: uno per A e uno per B
self.netD_A = Discriminator(input_nc)
self.netD_B = Discriminator(output_nc)
# Applichiamo la normalizzazione
self.netG_A2B.apply(weights_init_normal)
self.netG_B2A.apply(weights_init_normal)
self.netD_A.apply(weights_init_normal)
self.netD_B.apply(weights_init_normal)
# Definiamo le loss
self.criterion_GAN = torch.nn.MSELoss()
self.criterion_cycle = torch.nn.L1Loss()
self.criterion_identity = torch.nn.L1Loss()
def forward(self, x, mode='A2B'):
if mode=='A2B':
return netG_A2B(x)
else:
return netG_B2A(x)
# ci servono 3 optimizer, ognuno con il suo scheduler
def configure_optimizers(self):
# Optimizer per il generatore
optimizer_G = torch.optim.Adam(itertools.chain(self.netG_A2B.parameters(), self.netG_B2A.parameters()),
lr=self.hparams.lr, betas=self.hparams.betas)
# Optimizers per i due discriminatori
optimizer_D_A = torch.optim.Adam(self.netD_A.parameters(), lr=self.hparams.lr, betas=self.hparams.betas)
optimizer_D_B = torch.optim.Adam(self.netD_B.parameters(), lr=self.hparams.lr, betas=self.hparams.betas)
# Questi scheduler fanno decadere il learning rate dopo 100 epoche
lr_scheduler_G = torch.optim.lr_scheduler.LambdaLR(optimizer_G, lr_lambda=LambdaLR(self.hparams.n_epochs, self.hparams.starting_epoch, self.hparams.decay_epoch).step)
lr_scheduler_D_A = torch.optim.lr_scheduler.LambdaLR(optimizer_D_A, lr_lambda=LambdaLR(self.hparams.n_epochs, self.hparams.starting_epoch, self.hparams.decay_epoch).step)
lr_scheduler_D_B = torch.optim.lr_scheduler.LambdaLR(optimizer_D_B, lr_lambda=LambdaLR(self.hparams.n_epochs, self.hparams.starting_epoch, self.hparams.decay_epoch).step)
# Restituiamo i tre optimizer e i tre optimizers
return [optimizer_G, optimizer_D_A, optimizer_D_B], [lr_scheduler_G, lr_scheduler_D_A, lr_scheduler_D_B]
def training_step(self, batch, batch_idx, optimizer_idx):
real_A, real_B = batch
target_real = torch.ones((real_A.shape[0],1)).type_as(real_A)
target_fake = torch.zeros((real_A.shape[0],1)).type_as(real_A)
# optimizer del generatore
if optimizer_idx==0:
# Identity loss
# G_A2B(B) should equal B if real B is fed
same_B = self.netG_A2B(real_B) # passa B al generatore A2B - deve essere uguale a B
loss_identity_B = self.criterion_identity(same_B, real_B)*5.0
# G_B2A(A) should equal A if real A is fed
same_A = self.netG_B2A(real_A) # passa A al generatore B2A - deve essere uguale ad A
loss_identity_A = self.criterion_identity(same_A, real_A)*5.0
# GAN loss
fake_B = self.netG_A2B(real_A) # passa A ad A2B - sono le fake B
pred_fake = self.netD_B(fake_B) # predizioni del discriminatore B
loss_GAN_A2B = self.criterion_GAN(pred_fake, target_real) # loss GAN per A2B
fake_A = self.netG_B2A(real_B) # passa B a B2A - sono le fake A
pred_fake = self.netD_A(fake_A) # predizioni del discriminatore A
loss_GAN_B2A = self.criterion_GAN(pred_fake, target_real) # loss GAN per B2A
# Cycle consistency loss
recovered_A = self.netG_B2A(fake_B) #passiamo le fake B a B2A - devono essere uguali a real_A
loss_cycle_ABA = self.criterion_cycle(recovered_A, real_A)*10.0 #cycle consistency loss
recovered_B = self.netG_A2B(fake_A) #passiamo le fake A a A2B - devono essere uguali a real_B
loss_cycle_BAB = self.criterion_cycle(recovered_B, real_B)*10.0 #cycle consistency loss
# loss globale
loss_G = loss_identity_A + loss_identity_B + loss_GAN_A2B + loss_GAN_B2A + loss_cycle_ABA + loss_cycle_BAB
self.log('loss_G/loss_identity_A', loss_identity_A)
self.log('loss_G/loss_identity_B', loss_identity_B)
self.log('loss_G/loss_GAN_A2B', loss_GAN_A2B)
self.log('loss_G/loss_GAN_B2A', loss_GAN_B2A)
self.log('loss_G/loss_cycle_ABA', loss_cycle_ABA)
self.log('loss_G/loss_cycle_BAB', loss_cycle_BAB)
self.log('loss_G/overall', loss_G)
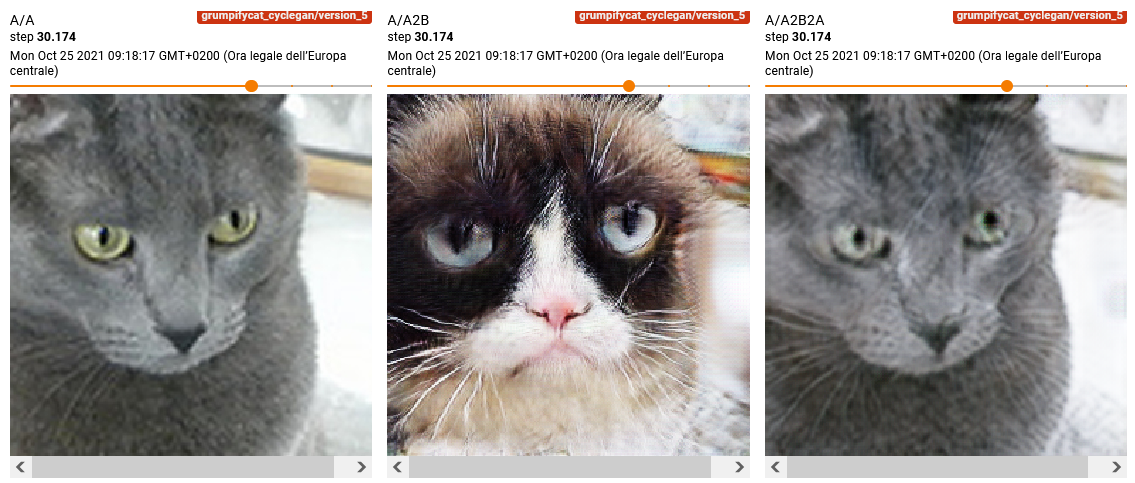
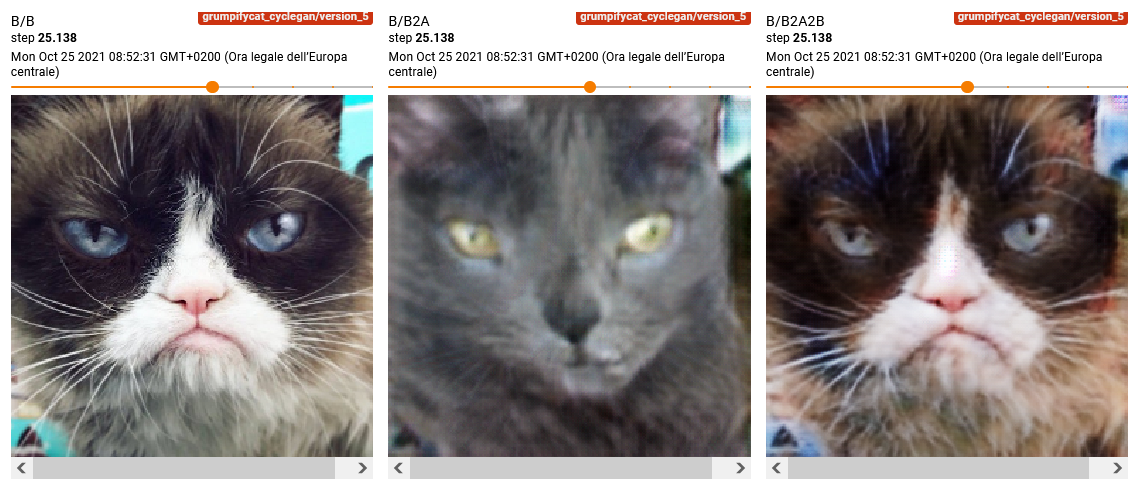
# loggiamo dei campioni visivi da ispezionare durante il training ogni 100 batch
if batch_idx % 100 ==0:
grid_A = torchvision.utils.make_grid(real_A[:50], nrow=10, normalize=True)
grid_A2B = torchvision.utils.make_grid(fake_B[:50], nrow=10, normalize=True)
grid_A2B2A = torchvision.utils.make_grid(recovered_A[:50], nrow=10, normalize=True)
grid_B = torchvision.utils.make_grid(real_B[:50], nrow=10, normalize=True)
grid_B2A = torchvision.utils.make_grid(fake_A[:50], nrow=10, normalize=True)
grid_B2A2B = torchvision.utils.make_grid(recovered_B[:50], nrow=10, normalize=True)
self.logger.experiment.add_image('A/A', grid_A, self.global_step)
self.logger.experiment.add_image('A/A2B', grid_A2B, self.global_step)
self.logger.experiment.add_image('A/A2B2A', grid_A2B2A, self.global_step)
self.logger.experiment.add_image('B/B', grid_B, self.global_step)
self.logger.experiment.add_image('B/B2A', grid_B2A, self.global_step)
self.logger.experiment.add_image('B/B2A2B', grid_B2A2B, self.global_step)
return loss_G
elif optimizer_idx==1: #discriminatore A
# Real loss
pred_real = self.netD_A(real_A)
loss_D_real = self.criterion_GAN(pred_real, target_real)
# Fake loss
fake_A = self.netG_B2A(real_B) # passa B a B2A - sono le fake A
pred_fake = self.netD_A(fake_A.detach())
loss_D_fake = self.criterion_GAN(pred_fake, target_fake)
# loss globale
loss_D_A = (loss_D_real + loss_D_fake)*0.5
self.log('loss_D/loss_D_A',loss_D_A)
return loss_D_A
elif optimizer_idx==2: #discriminatore B
pred_real = self.netD_B(real_B)
loss_D_real = self.criterion_GAN(pred_real, target_real)
# Fake loss
fake_B = self.netG_A2B(real_A) # passa A ad A2B - sono le fake B
pred_fake = self.netD_B(fake_B.detach())
loss_D_fake = self.criterion_GAN(pred_fake, target_fake)
# loss globale
loss_D_B = (loss_D_real + loss_D_fake)*0.5
self.log('loss_D/loss_D_B', loss_D_B)
return loss_D_B
# Definiamo il dataloader di training
def train_dataloader(self):
transform = transforms.Compose([
transforms.Resize(int(self.hparams.image_size*1.12), Image.BICUBIC), #ridimensioniamo a una dimensione più grande di quella di input
transforms.RandomCrop(self.hparams.image_size), #random crop alla dimensione di input
transforms.RandomHorizontalFlip(), #random flip orizzontale
transforms.ToTensor(), #trasformiamo in tensore
transforms.Normalize((0.5,0.5,0.5), (0.5,0.5,0.5)) #applichiamo la normalizzazione
])
dataloader = DataLoader(ImageDataset(self.hparams.data_root, transform=transform),
batch_size=self.hparams.batch_size, shuffle=True, num_workers=self.hparams.n_cpu)
return dataloader
Una volta definito il modulo, effettuiamo il training con Lightning:
from pytorch_lightning.loggers import TensorBoardLogger
cycle_gan = CycleGAN(data_root='grumpifycat')
logger = TensorBoardLogger("tb_logs", name="grumpifycat_cyclegan")
trainer = pl.Trainer(gpus=1, logger=logger, MAX_EPOCHS=200)
trainer.fit(cycle_gan)
GPU available: True, used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
| Name | Type | Params
-----------------------------------------------------
0 | netG_A2B | Generator | 11.4 M
1 | netG_B2A | Generator | 11.4 M
2 | netD_A | Discriminator | 2.8 M
3 | netD_B | Discriminator | 2.8 M
4 | criterion_GAN | MSELoss | 0
5 | criterion_cycle | L1Loss | 0
6 | criterion_identity | L1Loss | 0
-----------------------------------------------------
28.3 M Trainable params
0 Non-trainable params
28.3 M Total params
113.143 Total estimated model params size (MB)
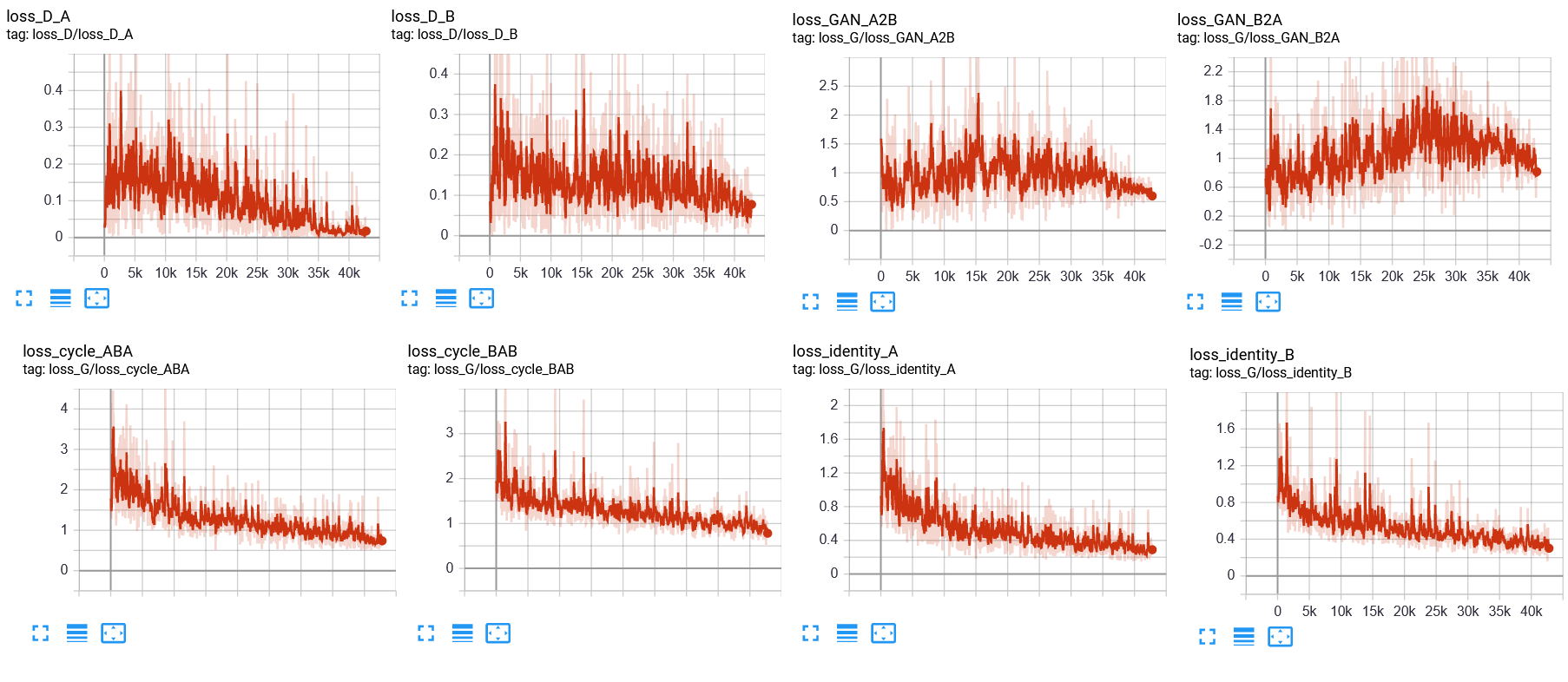
Alla fine del training, dovremmo visualizzare delle curve e immagini simili su Tensorboard:
Alcuni esempi di trasformazioni visualizzati durante il training sono riportati sotto:
1.3 Risultati
Notiamo che PyTorch Lightning ha salvato in automatico l’ultimo checkpoint del modello in tb_logs/grumpifycat_cyclegan/version_1/checkpoints/. Questo checkpoint può essere caricato come segue:
mod = CycleGAN.load_from_checkpoint('tb_logs/grumpifycat_cyclegan/version_1/checkpoints/epoch=199-step=42799.ckpt')
Vediamo adesso di stampare alcuni esempi di traduzione da un dominio all’altro. Iniziamo recuperando il dataset di training:
dset = mod.train_dataloader().dataset
Adesso definiamo una funzione per effettuare la traduzione A2B e quella B2A per verificare che l’identità è rispettata:
from matplotlib import pyplot as plt
def print_example_A2B(i):
image_in = dset[i][0]
a2b = mod.netG_A2B(image_in.unsqueeze(0))
a2b2a = mod.netG_B2A(a2b)
image_in = image_in.detach().numpy().transpose(1,2,0)
image_in-=image_in.min()
image_in/=image_in.max()
a2b = a2b.squeeze().detach().numpy().transpose(1,2,0)
a2b-=a2b.min()
a2b/=a2b.max()
a2b2a = a2b2a.squeeze().detach().numpy().transpose(1,2,0)
a2b2a-=a2b2a.min()
a2b2a/=a2b2a.max()
plt.figure(figsize=(12,8))
plt.subplot(131)
plt.imshow(image_in)
plt.title('A')
plt.axis('off')
plt.subplot(132)
plt.imshow(a2b)
plt.title('A2B')
plt.axis('off')
plt.subplot(133)
plt.imshow(a2b2a)
plt.title('A2B2A')
plt.axis('off')
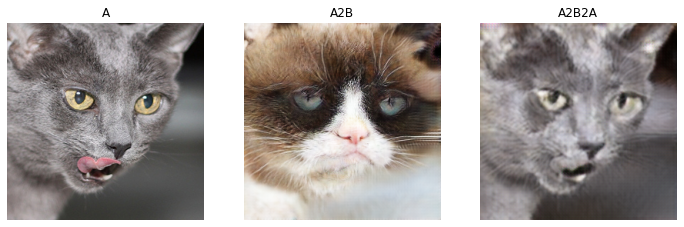
Visualizziamo alcuni esempi di trasformazione:
print_example_A2B(0)
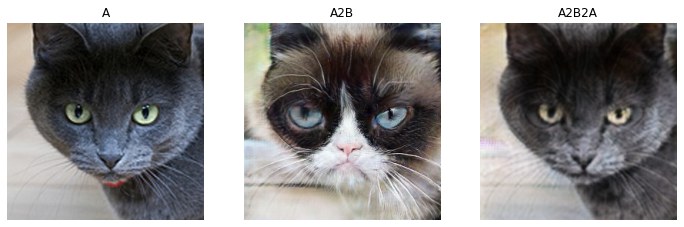
print_example_A2B(300)
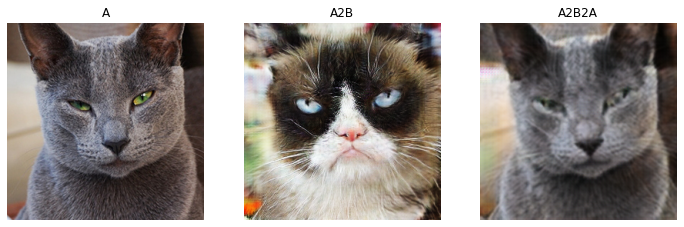
print_example_A2B(128)
| Domanda 4 Si analizzino degli altri esempi di trasformazione dell’immagine. Possiamo dire che il modello funziona? Ha dei limiti? |
Si noti che l’implementazione qui fornita è stata riscritta per migliorarne la leggibilità e dunque essa non è quella ufficiale. E’ consigliabile usare l’implementazione ufficiale per essere sicuri di avere i risultati più in linea con la pubblicazione scientifica: https://github.com/junyanz/pytorch-CycleGAN-and-pix2pix.
2 Feature-level Domain Adaptation
Vedremo adesso degli altri esempi di domain adaptation. In questo caso l’adattamento non viene fatto al livello dei pixel, ma al livello delle feature estratte dal modello. Considereremo in particolare il problema della classificazione delle immagini appartenenti a due domini: uno sorgente e uno target. Le immagini del dominio sorgente sono etichettate, mentre quelle del dominio target non sono etichettate. Entrambi i domini condividono lo stesso spazio delle etichette. L’obiettivo è quello di allenare un modello capace di fare training sulle immagini etichettate del dominio sorgente e su quelle non etichettate del dominio target e funzionare bene in fase di test sulle immagini di entrambi i domini. Questo setup è detto unsupervised domain adaptation in quanto le immagini del dominio target sono non etichettate e dunque l’adattamento è non supervisionato.
Definiamo un numero di epoche per il quale fare training:
NUM_EPOCHS=50
2.1 Dati
Considereremo due dataset di immagini di cifre comprese tra 0 e 9. Uno dei due è il classico MNIST, mentre l’altro è MNISTM, una versione di MNIST in cui le cifre sono incollate su sfondi colorati.
Utilizzeremo l’implementazione disponibile a questo link per caricare il dataset:
class MNISTM(Dataset):
"""`MNIST-M Dataset."""
url = "https://github.com/VanushVaswani/keras_mnistm/releases/download/1.0/keras_mnistm.pkl.gz"
raw_folder = "raw"
processed_folder = "processed"
training_file = "mnist_m_train.pt"
test_file = "mnist_m_test.pt"
def __init__(self, root, mnist_root="data", train=True, transform=None, target_transform=None, download=False):
"""Init MNIST-M dataset."""
super(MNISTM, self).__init__()
self.root = os.path.expanduser(root)
self.mnist_root = os.path.expanduser(mnist_root)
self.transform = transform
self.target_transform = target_transform
self.train = train # training set or test set
if download:
self.download()
if not self._check_exists():
raise RuntimeError("Dataset not found." + " You can use download=True to download it")
if self.train:
self.train_data, self.train_labels = torch.load(
os.path.join(self.root, self.processed_folder, self.training_file)
)
else:
self.test_data, self.test_labels = torch.load(
os.path.join(self.root, self.processed_folder, self.test_file)
)
def __getitem__(self, index):
"""Get images and target for data loader.
Args:
index (int): Index
Returns:
tuple: (image, target) where target is index of the target class.
"""
if self.train:
img, target = self.train_data[index], self.train_labels[index]
else:
img, target = self.test_data[index], self.test_labels[index]
# doing this so that it is consistent with all other datasets
# to return a PIL Image
img = Image.fromarray(img.squeeze().numpy(), mode="RGB")
if self.transform is not None:
img = self.transform(img)
if self.target_transform is not None:
target = self.target_transform(target)
return img, target
def __len__(self):
"""Return size of dataset."""
if self.train:
return len(self.train_data)
else:
return len(self.test_data)
def _check_exists(self):
return os.path.exists(os.path.join(self.root, self.processed_folder, self.training_file)) and os.path.exists(
os.path.join(self.root, self.processed_folder, self.test_file)
)
def download(self):
"""Download the MNIST data."""
# import essential packages
from six.moves import urllib
import gzip
import pickle
from torchvision import datasets
# check if dataset already exists
if self._check_exists():
return
# make data dirs
try:
os.makedirs(os.path.join(self.root, self.raw_folder))
os.makedirs(os.path.join(self.root, self.processed_folder))
except OSError as e:
if e.errno == errno.EEXIST:
pass
else:
raise
# download pkl files
print("Downloading " + self.url)
filename = self.url.rpartition("/")[2]
file_path = os.path.join(self.root, self.raw_folder, filename)
if not os.path.exists(file_path.replace(".gz", "")):
data = urllib.request.urlopen(self.url)
with open(file_path, "wb") as f:
f.write(data.read())
with open(file_path.replace(".gz", ""), "wb") as out_f, gzip.GzipFile(file_path) as zip_f:
out_f.write(zip_f.read())
os.unlink(file_path)
# process and save as torch files
print("Processing...")
# load MNIST-M images from pkl file
with open(file_path.replace(".gz", ""), "rb") as f:
mnist_m_data = pickle.load(f, encoding="bytes")
mnist_m_train_data = torch.ByteTensor(mnist_m_data[b"train"])
mnist_m_test_data = torch.ByteTensor(mnist_m_data[b"test"])
# get MNIST labels
mnist_train_labels = datasets.MNIST(root=self.mnist_root, train=True, download=True).train_labels
mnist_test_labels = datasets.MNIST(root=self.mnist_root, train=False, download=True).test_labels
# save MNIST-M dataset
training_set = (mnist_m_train_data, mnist_train_labels)
test_set = (mnist_m_test_data, mnist_test_labels)
with open(os.path.join(self.root, self.processed_folder, self.training_file), "wb") as f:
torch.save(training_set, f)
with open(os.path.join(self.root, self.processed_folder, self.test_file), "wb") as f:
torch.save(test_set, f)
print("Done!")
Carichiamo il dataset:
mnistm_train = MNISTM(root='data', train=True, download=True)
Vediamo qualche esempio:
j=1
plt.figure(figsize=(12,4))
for i in np.random.permutation(len(mnistm_train))[:16]:
plt.subplot(2,8,j)
plt.imshow(np.array(mnistm_train[i][0]))
plt.title(mnistm_train[i][1].item())
plt.axis('off')
j+=1
plt.show()

Confrontiamo gli esempi con il solito MNIST:
from torchvision.datasets import MNIST
mnist_train = MNIST(root = 'data',train=True, download=True)
j=1
plt.figure(figsize=(12,4))
for i in np.random.permutation(len(mnist_train))[:16]:
plt.subplot(2,8,j)
plt.imshow(np.array(mnist_train[i][0]), cmap='gray')
plt.title(mnist_train[i][1])
plt.axis('off')
j+=1
plt.show()
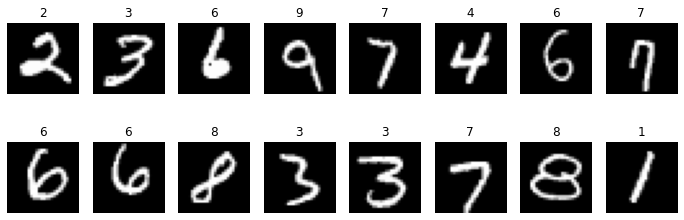
| Domanda 5 Si confrontino gli esempi di immagini provenienti dai due dataset. Quali sono le differenze principali? |
Definiamo adesso dataset e dataloader:
transform = transforms.Compose([
transforms.Lambda(lambda x: x.convert('RGB')),
transforms.ToTensor(),
transforms.Normalize((0.5,0.5,0.5),(0.5,0.5,0.5))
])
mnist_train = MNIST('data', train=True, transform=transform, download=True)
mnist_test = MNIST('data', train=False, transform=transform, download=True)
mnist_train_loader = DataLoader(mnist_train, batch_size=256, shuffle=True, num_workers=8)
mnist_test_loader = DataLoader(mnist_test, batch_size=256, num_workers=8)
mnistm_train = MNISTM('data', train=True, transform=transform, download=True)
mnistm_test = MNISTM('data', train=False, transform=transform, download=True)
mnistm_train_loader = DataLoader(mnistm_train, batch_size=256, shuffle=True, num_workers=8)
mnistm_test_loader = DataLoader(mnistm_test, batch_size=256, num_workers=8)
2.2 Modelli
Utilizzeremo come modello per la classificazione una semplice rete neurale basata su convoluzioni:
from torch import nn
class Net(nn.Module):
def __init__(self):
super().__init__()
# modello feature extractor
self.feature_extractor = nn.Sequential(
# primo layer di convoluzioni
nn.Conv2d(3, 10, kernel_size=5),
nn.MaxPool2d(2),
nn.ReLU(),
# secondo layer di convoluzioni
nn.Conv2d(10, 20, kernel_size=5),
nn.MaxPool2d(2),
nn.Dropout2d(),
)
# modulo di classificazione a partire dalle feature
self.classifier = nn.Sequential(
nn.Linear(320, 50),
nn.ReLU(),
nn.Dropout(),
nn.Linear(50, 10),
)
def forward(self, x):
# estrazione delle feature
features = self.feature_extractor(x)
# reshape delle features
features = features.view(x.shape[0], -1)
# otteniamo i logits mediante il classificatore
logits = self.classifier(features)
return logits
Il modello definito sopra è progettato per lavorare con input di dimensione $3 \times 28 \times 28$. Vediamo le dimensioni intermedie delle feature map con la funzione summary:
mod = Net().cuda()
summary(mod, (3,28,28))
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 10, 24, 24] 760
MaxPool2d-2 [-1, 10, 12, 12] 0
ReLU-3 [-1, 10, 12, 12] 0
Conv2d-4 [-1, 20, 8, 8] 5,020
MaxPool2d-5 [-1, 20, 4, 4] 0
Dropout2d-6 [-1, 20, 4, 4] 0
Linear-7 [-1, 50] 16,050
ReLU-8 [-1, 50] 0
Dropout-9 [-1, 50] 0
Linear-10 [-1, 10] 510
================================================================
Total params: 22,340
Trainable params: 22,340
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.01
Forward/backward pass size (MB): 0.08
Params size (MB): 0.09
Estimated Total Size (MB): 0.18
----------------------------------------------------------------
2.2.1 Baseline
Inizieremo considerando un approccio baseline che consiste in allenare la rete su MNIST e fare test su MNISTM. Definiamo un oggetto di Lightning per effettuare il training. Dato che abbiamo già definito il modello, applicheremo un paradigma diverso in cui il modulo di Lightning è considerato un “task” piuttosto che un modello:
from torch.optim import SGD
from sklearn.metrics import accuracy_score
class ClassificationTask(pl.LightningModule):
def __init__(self, model):
super(ClassificationTask, self).__init__()
self.model = model
self.criterion = nn.CrossEntropyLoss()
def forward(self,x):
return self.model(x)
def configure_optimizers(self):
return torch.optim.Adam(self.model.parameters())
def training_step(self, train_batch, batch_idx):
x, y = train_batch
output = self.forward(x)
loss = self.criterion(output,y)
self.log('train/loss', loss)
return loss
def validation_step(self, val_batch, batch_idx):
x, y = val_batch
output = self.forward(x)
return {
'predictions': output.cpu().topk(1).indices,
'labels': y.cpu()
}
def validation_epoch_end(self, outputs):
predictions = np.concatenate([o['predictions'] for o in outputs])
labels = np.concatenate([o['labels'] for o in outputs])
acc = accuracy_score(labels, predictions)
self.log('val/accuracy', acc)
def test_step(self, test_batch, batch_idx):
x, y = test_batch
output = self.forward(x)
return {
'predictions': output.cpu().topk(1).indices,
'labels': y.cpu()
}
def test_epoch_end(self, outputs):
predictions = np.concatenate([o['predictions'] for o in outputs])
labels = np.concatenate([o['labels'] for o in outputs])
acc = accuracy_score(labels, predictions)
self.log('test/accuracy', acc)
Adesso definiamo e alleniamo il modello su MNIST:
mnist_noadapt = ClassificationTask(Net())
logger = TensorBoardLogger("adaptation_logs", name="mnist_noadapt")
mnist_noadapt_trainer = pl.Trainer(max_epochs=NUM_EPOCHS, gpus=1, logger=logger)
mnist_noadapt_trainer.fit(mnist_noadapt, mnist_train_loader, mnist_test_loader)
GPU available: True, used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
| Name | Type | Params
-----------------------------------------------
0 | model | Net | 22.3 K
1 | criterion | CrossEntropyLoss | 0
-----------------------------------------------
22.3 K Trainable params
0 Non-trainable params
22.3 K Total params
0.089 Total estimated model params size (MB)
Dopo il training, le curve di performance saranno simili alle seguenti:
Validiamo adesso il modello sul validation set e memorizziamone il risultato:
mnist_noadapt_mnist_accuracy = mnist_noadapt_trainer.test(dataloaders=mnist_test_loader)[0]['test/accuracy']
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
--------------------------------------------------------------------------------
DATALOADER:0 TEST RESULTS
{'test/accuracy': 0.9898999929428101}
--------------------------------------------------------------------------------
Testiamo adesso il modello sul dominio target MNISTM:
mnist_noadapt_mnistm_accuracy = mnist_noadapt_trainer.test(dataloaders=mnistm_test_loader)[0]['test/accuracy']
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
--------------------------------------------------------------------------------
DATALOADER:0 TEST RESULTS
{'test/accuracy': 0.6302000284194946}
--------------------------------------------------------------------------------
2.2.2 Oracolo
Consideriamo adesso il modello oracolo, ovvero lo stesso modello allenato sui dati di MNISTM etichettati. Si noti che queste performance non sono direttamente confrontabili con quegli degli altri modelli in quanto sono relative a modelli che fanno uso delle etichette del dominio target. E’ tuttavia utile considerare i risultati del modello oracolo come una sorta di upperbound delle performance raggiungibili mediante domain adaptation.
mnistm_noadapt = ClassificationTask(Net())
logger = TensorBoardLogger("adaptation_logs", name="mnistm_noadapt")
mnistm_noadapt_trainer = pl.Trainer(max_epochs=NUM_EPOCHS, gpus=1, logger=logger)
mnistm_noadapt_trainer.fit(mnistm_noadapt, mnistm_train_loader, mnistm_test_loader)
GPU available: True, used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
| Name | Type | Params
-----------------------------------------------
0 | model | Net | 22.3 K
1 | criterion | CrossEntropyLoss | 0
-----------------------------------------------
22.3 K Trainable params
0 Non-trainable params
22.3 K Total params
0.089 Total estimated model params size (MB)
Alla fine del training, le curve di performance saranno simili alle seguenti:
Testiamo adesso il modello sul dominio target:
mnistm_noadapt_mnistm_accuracy = mnistm_noadapt_trainer.test(dataloaders=mnistm_test_loader)[0]['test/accuracy']
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
--------------------------------------------------------------------------------
DATALOADER:0 TEST RESULTS
{'test/accuracy': 0.9642999768257141}
--------------------------------------------------------------------------------
Per confrontare le varie performance, possiamo iniziare a costruire una tabella:
import pandas as pd
results = pd.DataFrame({
'Model':['No Adaptation', 'Oracle'],
'MNIST':[mnist_noadapt_mnist_accuracy, '-'],
'MNISTM': [mnist_noadapt_mnistm_accuracy, mnistm_noadapt_mnistm_accuracy]
})
results
| Model | MNIST | MNISTM | |
|---|---|---|---|
| 0 | No Adaptation | 0.9899 | 0.6302 |
| 1 | Oracle | - | 0.9643 |
| Domanda 6 Si confrontino le performance ottenute nei diversi setting. Quale modello funziona meglio sul target domain? Perché? Quale dei risultati coincide con un setting di domain adaptation? |
2.2.3 Gradient Reversal layer
Vedremo come implementare il metodo di domain adaptation definito in questa pubblicazione scientifica: https://arxiv.org/abs/1409.7495. L’algoritmo segue lo schema mostrato nell’immagine che segue:
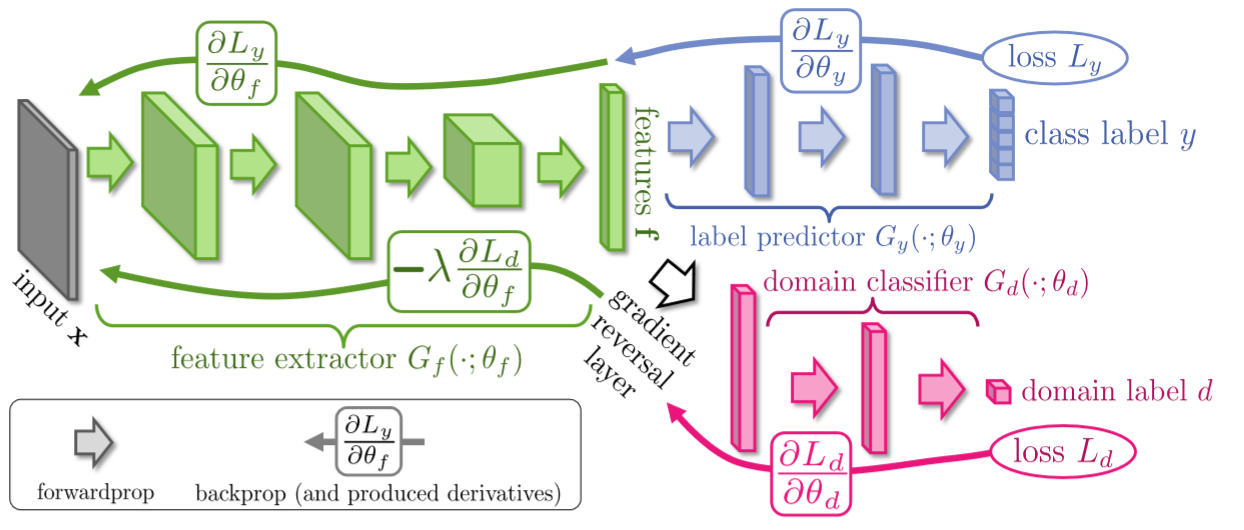
Immagine da https://arxiv.org/abs/1409.7495
In pratica viene usato un modulo “feature extractor” (la backbone) per estrarre le feature dalle immagini di entrambi i domini. Un modulo “label predictor” viene dunque ustao per classificare le immagini del dominio A a partire dalle feature estratte. Un discriminatore viene usato per incoraggiare la backbone a estrarre feature che siano indipendenti rispetto al dominio (dunque i due domini saranno indistinguibili guardando solo le feature). A differenza delle GAN, il training non è effettuato in maniera alternata, ma viene utilizzato un Gradient Reversal Layer (GLR) per ottimizzare al contempo il discriminatore e il feature extractor.
In questo laboratorio, seguiremo l’implementazione fornita qui: https://github.com/jvanvugt/pytorch-domain-adaptation.
L’architetura che implementeremo si basa sul Gradinent Reversal Layer, le cui funzioni di forward e di backward sono definite come segue:
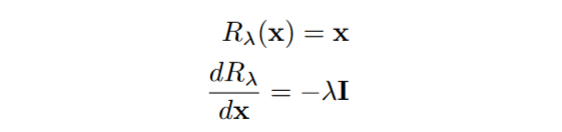
In pratica, in fase di forward, il modulo restituisce il suo input, mentre in fase di backward, viene invertito il gradiente. Seguiremo la pubblicazione originale e fare crescere il valore di $\lambda$ durante il training usando questa formula:

Dove $\gamma=10$ e $p \in [0,1]$ indica l’avanzamento del training (lo calcoloremo come epoca_corrente/numero_di_epoche.
Definiamo il modulo di gradient reversal layer:
from torch.autograd import Function
class RevGrad(Function):
@staticmethod
def forward(ctx, input_, lambda_):
lambda_ = torch.Tensor([lambda_]).type_as(input_)
ctx.save_for_backward(input_, lambda_)
output = input_
return output
@staticmethod
def backward(ctx, grad_output): # pragma: no cover
grad_input = None
_, lambda_ = ctx.saved_tensors
if ctx.needs_input_grad[0]:
grad_input = -grad_output * lambda_
return grad_input, None
revgrad = RevGrad.apply
Implementiamo adesso il modulo per il training basato su gradient reversal layer. Iniziamo definendo il discriminatore. Questo modulo prenderà in input la mappa di feature restituita dal feature extractor e predirà il dominio di appartenenza:
class DiscriminatorGRL(torch.nn.Module):
def __init__(self):
super(DiscriminatorGRL, self).__init__()
self.model = nn.Sequential(
nn.Linear(320, 50),
nn.ReLU(),
nn.Linear(50, 20),
nn.ReLU(),
nn.Linear(20, 1)
)
def forward(self, x, lambda_=1):
return self.model(revgrad(x, lambda_))
Analizziamo le dimensioni intermedie delle mappe di feature del discriminatore. Useremo come dimensione dell’input un vettore di $320$ elementi, che è la dimensione dell’output del feature extractor:
disc = DiscriminatorGRL().cuda()
summary(disc, (320,))
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Linear-1 [-1, 50] 16,050
ReLU-2 [-1, 50] 0
Linear-3 [-1, 20] 1,020
ReLU-4 [-1, 20] 0
Linear-5 [-1, 1] 21
================================================================
Total params: 17,091
Trainable params: 17,091
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.00
Forward/backward pass size (MB): 0.00
Params size (MB): 0.07
Estimated Total Size (MB): 0.07
----------------------------------------------------------------
Durante il training, l’algoritmo dovrà prendere in input un batch di immagini appartenenti al dominio sorgente e un batch di immagini appartenenti al dominio target. Per semplificare questo tipo di caricamento, definiamo un oggetto MultiDomainDataset che carica coppie di immagini dei due domini:
class MultiDomainDataset(Dataset):
def __init__(self, source_dataset, target_dataset):
self.source = source_dataset
self.target = target_dataset
def __getitem__(self, index):
im_source, lab_source = self.source[index]
im_target, _ = self.target[random.randint(0, len(self.target)-1)]
return im_source, im_target, lab_source
def __len__(self):
return len(self.source)
Costruiamo il dataset multidominio mnist_mnistm che usa MNIST come dominio sorgente e MNISTM come dominio target:
mnist_mnistm_train = MultiDomainDataset(mnist_train, mnistm_train)
mnist_mnistm_train_loader = DataLoader(mnist_mnistm_train, shuffle=True, num_workers=8, batch_size=256)
Definiamo a questo punto il modulo per il training del modello basato su Gradient Reversal Layer:
class DomainAdaptationGRLTask(pl.LightningModule):
def __init__(self, model):
super(DomainAdaptationGRLTask, self).__init__()
self.model = model
self.discriminator = DiscriminatorGRL()
def forward(self,x):
return self.model(x)
def configure_optimizers(self):
return torch.optim.Adam(list(self.model.parameters()) + list(self.discriminator.parameters()))
def training_step(self, train_batch, batch_idx):
source, target, labels = train_batch
source_features = self.model.feature_extractor(source).view(source.shape[0], -1)
target_features = self.model.feature_extractor(target).view(target.shape[0], -1)
label_preds = self.model.classifier(source_features)
# calcoliamo il valore di lambda, che secondo la pubblicazione originale viene fatto
# crescere da 0 a 1 nel tempo secondo questa formula
l=2/(1+np.exp(-10*self.current_epoch/NUM_EPOCHS)) - 1
domain_preds_source = self.discriminator(source_features, l)
domain_preds_target = self.discriminator(target_features, l)
domain_preds = torch.cat([domain_preds_source, domain_preds_target],0)
source_acc = (torch.sigmoid(domain_preds_source)<0.5).float().mean()
target_acc = (torch.sigmoid(domain_preds_target)>=0.5).float().mean()
acc = (source_acc+target_acc)/2
source_targets = torch.zeros(source.shape[0],1)
target_targets = torch.ones(target.shape[0],1)
domain_targets = torch.cat([source_targets, target_targets],0).type_as(source)
label_loss = F.cross_entropy(label_preds, labels)
domain_loss = F.binary_cross_entropy_with_logits(domain_preds, domain_targets)
loss = domain_loss + label_loss
self.log('train/domain_loss', domain_loss)
self.log('train/label_loss', label_loss)
self.log('train/loss', loss)
self.log('train/disc_source_acc',source_acc)
self.log('train/disc_target_acc',target_acc)
self.log('train/disc_acc',acc)
return loss
def validation_step(self, val_batch, batch_idx):
x, y = val_batch
output = self.forward(x)
return {
'predictions': output.cpu().topk(1).indices,
'labels': y.cpu()
}
def validation_epoch_end(self, outputs):
predictions = np.concatenate([o['predictions'] for o in outputs])
labels = np.concatenate([o['labels'] for o in outputs])
acc = accuracy_score(labels, predictions)
self.log('val/accuracy', acc)
def test_step(self, test_batch, batch_idx):
x, y = test_batch
output = self.forward(x)
return {
'predictions': output.cpu().topk(1).indices,
'labels': y.cpu()
}
def test_epoch_end(self, outputs):
predictions = np.concatenate([o['predictions'] for o in outputs])
labels = np.concatenate([o['labels'] for o in outputs])
acc = accuracy_score(labels, predictions)
self.log('test/accuracy', acc)
Adesso effettuiamo il training. In fase di validation e test passeremo il dataset MNISTM in modo da poter monitorare la capacità del modello di generalizzare:
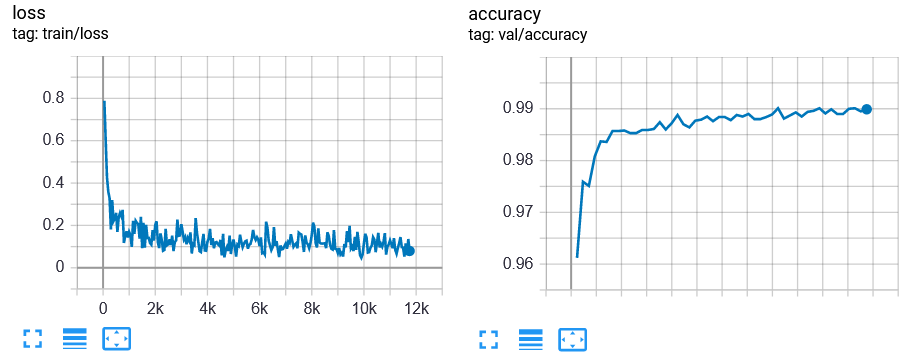
mnist_grl = DomainAdaptationGRLTask(Net())
logger = TensorBoardLogger("adaptation_logs", name="mnist_grl")
mnist_grl_trainer = pl.Trainer(max_epochs=NUM_EPOCHS, gpus=1, logger=logger)
mnist_grl_trainer.fit(mnist_grl, mnist_mnistm_train_loader, mnistm_test_loader)
GPU available: True, used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
| Name | Type | Params
---------------------------------------------------
0 | model | Net | 22.3 K
1 | discriminator | DiscriminatorGRL | 17.1 K
---------------------------------------------------
39.4 K Trainable params
0 Non-trainable params
39.4 K Total params
0.158 Total estimated model params size (MB)
Alla fine del training, i grafici di performance saranno simili ai seguenti:
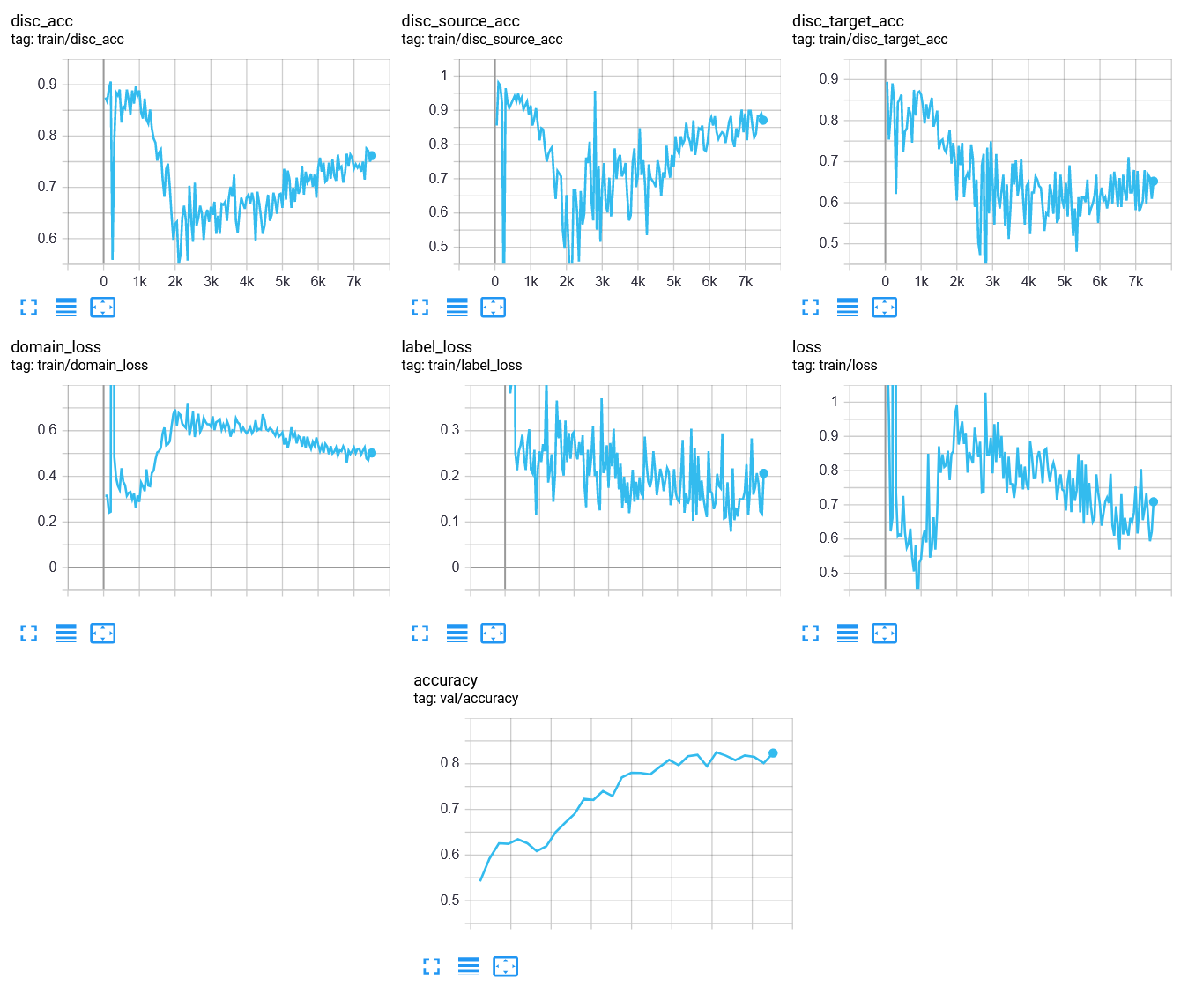
| Domanda 7 Si commentino i grafici ottenuti. A cosa sono dovute le oscillazioni nelle loss e accuracy del discriminatore? |
Testiamo adesso il modello sul dominio target:
mnistm_grl_mnistm_accuracy = mnist_grl_trainer.test(dataloaders=mnistm_test_loader)[0]['test/accuracy']
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
--------------------------------------------------------------------------------
DATALOADER:0 TEST RESULTS
{'test/accuracy': 0.828499972820282}
--------------------------------------------------------------------------------
Testiamo anche sul dominio sorgente per completezza:
mnistm_grl_mnist_accuracy = mnist_grl_trainer.test(dataloaders=mnist_test_loader)[0]['test/accuracy']
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
--------------------------------------------------------------------------------
DATALOADER:0 TEST RESULTS
{'test/accuracy': 0.982200026512146}
--------------------------------------------------------------------------------
Confrontiamo le performance dei modelli visti finora:
results = pd.DataFrame({
'Model':['No Adaptation', 'GRL', 'Oracle'],
'MNIST':[mnist_noadapt_mnist_accuracy, mnistm_grl_mnist_accuracy, '-'],
'MNISTM': [mnist_noadapt_mnistm_accuracy, mnistm_grl_mnistm_accuracy, mnistm_noadapt_mnistm_accuracy]
})
results
| Model | MNIST | MNISTM | |
|---|---|---|---|
| 0 | No Adaptation | 0.9899 | 0.6302 |
| 1 | GRL | 0.9822 | 0.8285 |
| 2 | Oracle | - | 0.9643 |
| Domanda 8 Si discutano i risultati ottenuti. Quali sono i migliori? Quale metodo offre maggiori vantaggi? |
2.2.4 Adversarial Domain Adaptation (ADDA)
Un altro metodo di feature-level domain adaptation di cui vedremo l’implementazione è ADDA (https://arxiv.org/pdf/1702.05464.pdf). Lo schema di funzionamento del metodo è descritto di seguito:
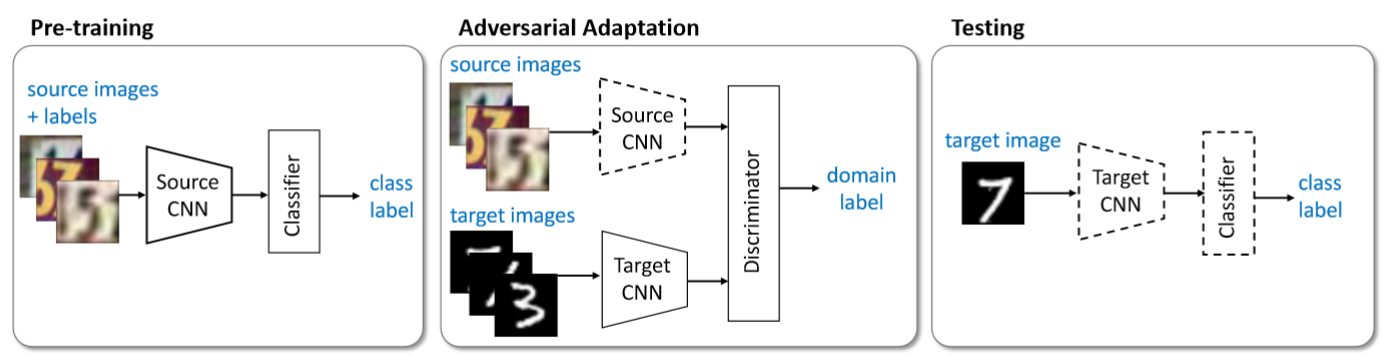
L’algoritmo funziona in tre fasi:
- Pre-training: la rete viene allenata con le immagini ed etichette del dominio sorgente. Si tratta del modello di baseline allenato in precedenza.
- Adversarial adaptation: in questo caso, viene utilizzato il princio delle GAN per effettuare un adattamento della rete. Più nello specifico, viene fatta una copia della rete di partenza e adattata mediante un discriminatore.
- Testing: il modello target viene utilizzato per il test direttamente sulle immagini target.
Per gli esperimenti con questo modello utilizzeremo nuovamente la coppia di dataset MNIST-MNISTM.
La fase di pre-training è già stata effettuata in precedenza con il modello di baseline. Utilizzeremo gli stessi feature extractor e classificatore. Definiamo invece un discriminatore senza GRL:
class Discriminator(torch.nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
self.model = nn.Sequential(
nn.Linear(320, 50),
nn.ReLU(),
nn.Linear(50, 20),
nn.ReLU(),
nn.Linear(20, 1)
)
def forward(self, x):
return self.model(x)
Vediamo dunque come implementare il modulo di Lightning che effetta l’adversarial adaptation:
class ADDATask(pl.LightningModule):
def __init__(self, source_model):
super(ADDATask, self).__init__()
self.source_model = source_model
self.target_model = Net()
self.target_model.load_state_dict(self.source_model.state_dict())
self.target_model = self.target_model.feature_extractor
self.discriminator = Discriminator()
self.criterion = nn.BCEWithLogitsLoss()
def forward(self,x):
features = self.target_model(x).view(x.shape[0],-1)
return self.source_model.classifier(features)
def configure_optimizers(self):
return torch.optim.Adam(self.discriminator.parameters()), torch.optim.Adam(self.target_model.parameters())
def training_step(self, train_batch, batch_idx, optimizer_idx):
source, target, labels = train_batch
if optimizer_idx==0: #train discriminator
source_features = self.source_model.feature_extractor(source).view(source.shape[0], -1)
target_features = self.target_model(target).view(target.shape[0], -1)
discriminator_x = torch.cat([source_features, target_features])
discriminator_y = torch.cat([torch.ones(source.shape[0]).type_as(source),
torch.zeros(target.shape[0]).type_as(source)])
preds = self.discriminator(discriminator_x).squeeze()
loss = self.criterion(preds, discriminator_y)
self.log('train/d_loss', loss)
return loss
else: #train generator
target_features = self.target_model(target).view(target.shape[0], -1)
# flipped labels
discriminator_y = torch.ones(target.shape[0]).type_as(source)
preds = self.discriminator(target_features).squeeze()
loss = self.criterion(preds, discriminator_y)
self.log('train/g_loss', loss)
return loss
def validation_step(self, val_batch, batch_idx):
x, y = val_batch
output = self.forward(x)
return {
'predictions': output.cpu().topk(1).indices,
'labels': y.cpu()
}
def validation_epoch_end(self, outputs):
predictions = np.concatenate([o['predictions'] for o in outputs])
labels = np.concatenate([o['labels'] for o in outputs])
acc = accuracy_score(labels, predictions)
self.log('val/accuracy', acc)
def test_step(self, test_batch, batch_idx):
x, y = test_batch
output = self.forward(x)
return {
'predictions': output.cpu().topk(1).indices,
'labels': y.cpu()
}
def test_epoch_end(self, outputs):
predictions = np.concatenate([o['predictions'] for o in outputs])
labels = np.concatenate([o['labels'] for o in outputs])
acc = accuracy_score(labels, predictions)
self.log('test/accuracy', acc)
Procediamo ora con il training:
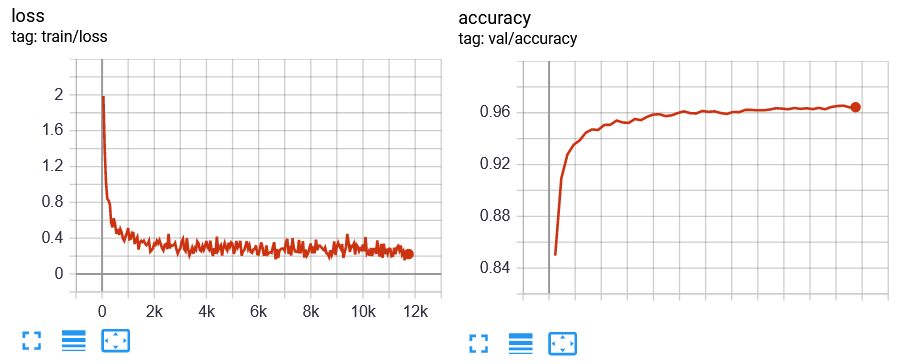
mnist_adda = ADDATask(mnist_noadapt.model)
logger = TensorBoardLogger("adaptation_logs", name="mnist_adda")
mnist_adda_trainer = pl.Trainer(max_epochs=NUM_EPOCHS, gpus=1, logger=logger)
mnist_adda_trainer.fit(mnist_adda, mnist_mnistm_train_loader, mnistm_test_loader)
GPU available: True, used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
| Name | Type | Params
----------------------------------------------------
0 | source_model | Net | 22.3 K
1 | target_model | Sequential | 5.8 K
2 | discriminator | Discriminator | 17.1 K
3 | criterion | BCEWithLogitsLoss | 0
----------------------------------------------------
45.2 K Trainable params
0 Non-trainable params
45.2 K Total params
0.181 Total estimated model params size (MB)
Le curve di performance dopo il training saranno simili alle seguenti:
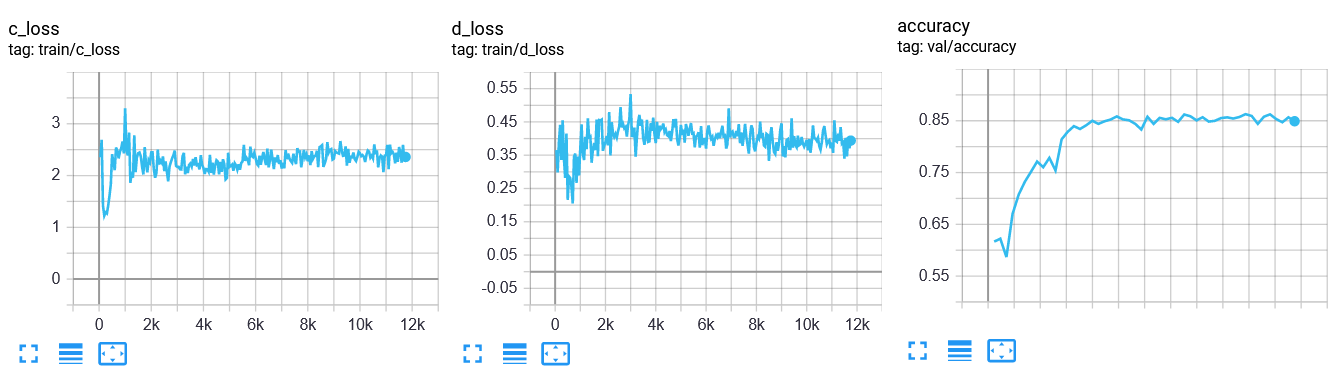
| Domanda 9 Si confrontino le curve ottenute da questo modello con quelle ottenute dal modello GRL. Ci sono differenze? Quale modello è più efficiente? |
Testiamo adesso il modello sul dominio target e sul dominio sorgente:
mnistm_adda_mnistm_accuracy = mnist_adda_trainer.test(dataloaders=mnistm_test_loader)[0]['test/accuracy']
mnistm_adda_mnist_accuracy = mnist_adda_trainer.test(dataloaders=mnist_test_loader)[0]['test/accuracy']
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [2]
--------------------------------------------------------------------------------
DATALOADER:0 TEST RESULTS
{'test/accuracy': 0.8490999937057495}
--------------------------------------------------------------------------------
--------------------------------------------------------------------------------
DATALOADER:0 TEST RESULTS
{'test/accuracy': 0.9212999939918518}
--------------------------------------------------------------------------------
Confrontiamo le performance dei modelli allenati finora:
results = pd.DataFrame({
'Model':['No Adaptation', 'GRL', 'ADDA', 'Oracle'],
'MNIST':[mnist_noadapt_mnist_accuracy, mnistm_grl_mnist_accuracy, mnistm_adda_mnist_accuracy, '-'],
'MNISTM': [mnist_noadapt_mnistm_accuracy, mnistm_grl_mnistm_accuracy, mnistm_adda_mnistm_accuracy, mnistm_noadapt_mnistm_accuracy]
})
results
| Model | MNIST | MNISTM | |
|---|---|---|---|
| 0 | No Adaptation | 0.9899 | 0.6302 |
| 1 | GRL | 0.9822 | 0.8285 |
| 2 | ADDA | 0.9213 | 0.8491 |
| 3 | Oracle | - | 0.9643 |
| Domanda 10 Si confrontino e discutano i risultati ottenuti dai vari modelli testati. Quale permette di ottenere le performance migliori? |
Esercizi
 | Esercizio 1 Gli autori di CycleGAN mettono a disposizione diversi dataset sui quali sperimentare al seguente link: https://people.eecs.berkeley.edu/~taesung_park/CycleGAN/datasets/. Si copi e adatti l’implementazione di CycleGAN qui definita per creare un programma contenuto in un file |
| Esercizio 2 Si ripeta il training effettuato nell’esercizio precedente utilizzando l’implementazione ufficiale di CycleGAN (https://github.com/junyanz/pytorch-CycleGAN-and-pix2pix). Si confrontino i risultati ottenuti con le due implementazioni. |
| Esercizio 3 CycleGAN può essere utilizzata per fare unsupervised domain adaptation. Si alleni CycleGAN per trasformare le immagini dal domino MNIST a MNISTM. Si eseguano dunque i seguenti esperimenti:
Si confrontino i tre metodi e si discutano loro pro e contro. |
| Esercizio 4 Si usi il codice presentato in questo laboratorio per scrivere un programma |
| Esercizio 5 Si usi il codice presentato in questo laboratorio per scrivere un programma |
| Esercizio 6 Si costruisca una architettura che mette insieme tutte le tecniche di domain adaptation viste in questo laboratorio considerando i dataset MNIST e MNISTM. In particolare:
Misurare le performance del modello nei vari stadi di training e commentare i risultati ottenuti. |
References
- Documentazione di PyTorch. http://pytorch.org/docs/stable/index.html
- Documentazione di PyTorch Lightning. https://www.pytorchlightning.ai/
- Esempi di domain adaptation con PyTorch. https://github.com/jvanvugt/pytorch-domain-adaptation