Reinforcement Learning
Contents
In questo laboratorio vedremo alcuni esempi di algoritmi di reinforcement learning.
(Il materiale che segue è in parte ripreso da: https://spinningup.openai.com/en/latest/spinningup/rl_intro.html e da: https://pytorch.org/tutorials/intermediate/reinforcement_q_learning.html ).
I principali attori nel reinforcement learning sono l’agente e l’ambiente. L’ambiente è il mondo in cui l’agente vive e con cui interagisce. Ad ogni passo dell’interazione, l’agente vede un’osservazione (anche parziale) dello stato del mondo, e poi sceglie un’azione da intraprendere. L’ambiente cambia quando l’agente agisce su di esso, ma può anche cambiare da solo.
L’agente ottiene anche una reward dall’ambiente, cioè un numero che indica quanto sia buono o cattivo lo stato attuale del mondo. L’obiettivo dell’agente è massimizzare la sua ricompensa cumulativa, chiamata rendimento. I metodi di apprendimento per rinforzo sono modi in cui l’agente può apprendere i comportamenti per raggiungere il suo obiettivo.
Altri termini importanti da conoscere per il reinforcement learning sono:
- Stati: una descrizione completa dello stato dell’ambiente;
- Osservazioni: una osservazione (anche parziale) di uno stato;
- Policy: una regola usata dall’agente per intraprendere una azione in quando viene osservato un dato stato: $a_t = \pi (s_t)$;
- Ritorno: un valore che cumula le reward $r_t$ ottenute al tempo $t$ su un orizzonte finito o infinito.
L’obiettivo di un algoritmo di reinforcement learning è in genere quello di apprendere una policy che cerchi di massimizzare il ritorno $R_{t_0} = \sum_{t=t_0}^{\infty} \gamma^{t - t_0} r_t$. Il parametro di sconto, $\gamma$, è una costante tra $0$ e $1$ che permette di pesare maggiormente le reward ottenute più di recente rispetto a quelle ricevute più lontano nel passato.
1. Q-Learning e Deep Q-Learning
L’idea principale alla base del Q-learning è quella di modellare una funzione $Q^*: Stato \times Azioni \rightarrow \mathbb{R}$, in grado di prevedere il valore di return qualora dovessimo scegliere una data azione in un dato stato. Se avessimo questa funzione, potremmo facilmente costruire una policy che massimizzi il ritorno:
\begin{align}\pi^*(s) = \arg\max_a \ Q^\*(s, a)\end{align}Il deep Q-Learning, in particolare, segue l’approccio di approssimare $Q^*$ mediante una rete neurale.
Per apprendere $Q$, sfrutteremo il fatto che la funzione $Q$ obbedisce all’equazione di Bellman:
\begin{align}Q(s, a) = r + \gamma Q(s', \pi(s'))\end{align}Dove $s'$ è lo stato che si ottiene effettuando l’azione $a$ nello stato $s$.
La differenza tra i due lati dell’uguaglianza è nota come errore di differenza temporale (temporal difference error), $\delta$:
\begin{align}\delta = Q(s, a) - (r + \gamma \max_a Q(s', a))\end{align}In pratica, per evitare catastrophic forgetting (ovvero un fenomeno in cui il modello peggiora le proprie prestazioni su episodi vecchi man mano che apprende i nuovi), utilizzeremo una vecchia copia della rete che approssima $Q$ nel secondo membro dell’equazione precedente. La copia sarà aggiornata ogni $10$ episodi copiando i pesi della rete che apporssima $Q$ e verrà chiamata target network.
Minimizzare questo errore può essere visto come un problema di regressione risolvibile con una loss MSE $\mathcal{L}(\delta)$.
Calcoleremo l’errore su una serie di transizioni $B$ campionate mediante memory replay:
\begin{align}\mathcal{L} = \frac{1}{|B|}\sum_{(s, a, s', r) \ \in \ B} \mathcal{L}(\delta)\end{align}2. Cart Pole
Useremo come esempio per mostrare l’algoritmo di Deep Q-Learning, il task “CartPole”. In questo task, l’agente comanda un carrello con un palo attaccato su mediante un perno. Ad ogni timestep l’agente dovrà scegliere tra due azioni: spostare il carrello a sinistra o spostare il carrello a destra, in modo che il palo posizionato sul carrello stia fermo (si veda: https://pytorch.org/tutorials/intermediate/reinforcement_q_learning.html ).
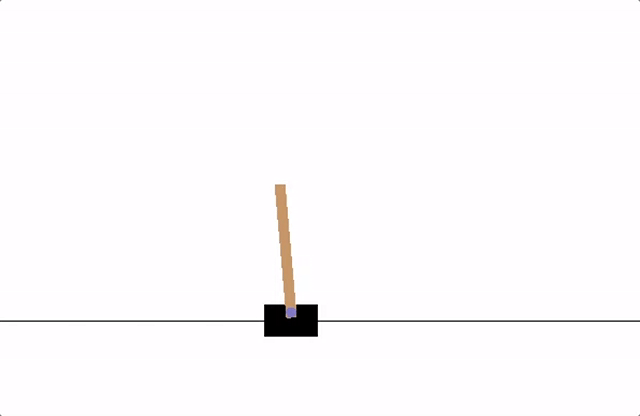
 | Domanda 1 Considerando l’immagine sopra, il carrello dovrebbe spostarsi a destra o a sinistra? |
In questo task, la reward ottenuta è +1 per ogni timestep in cui il palo resta in piedi, mentre l’episodio termina se il palo cade troppo lontano o se il carrello si sposta di più di 2.4 unità lontano dal centro. Ciò significa che gli scenari con prestazioni migliori verranno eseguiti per una durata maggiore, accumulando una reward maggiore.
In questo task, le osservazioni è un vettore di valori reali che contiene dati quali l’accelerazione e la velocità.
Per simulare gli episodi, utilizzremo gym (https://gym.openai.com/docs/), un toolkit pensato per l’allenamento di modelli di reinforcement learning. Possiamo installare gym con tutte le dipendenze con il comando:
pip install gym[all]
Possiamo trovare informazioni su questo task al seguente link: https://github.com/openai/gym/wiki/CartPole-v0. Ispezioniamo in particolare le azioni disponibili:
| Num | Action |
|---|---|
| 0 | Push cart to the left |
| 1 | Push cart to the right |
E la struttura delle osservazioni:
| Num | Observation | Min | Max |
|---|---|---|---|
| 0 | Cart Position | -2.4 | 2.4 |
| 1 | Cart Velocity | -Inf | Inf |
| 2 | Pole Angle | ~ -0.418 rad (-24°) | ~ 0.418 rad (24°) |
| 3 | Pole Velocity At Tip | -Inf | Inf |
| Domanda 2 Si considerino le osservazioni. In che modo sono utili ai fini dell’apprendimento della policy? |
2.1 Implementazione
Seguiremo l’implementazione disponibile qui (https://pytorch-lightning.readthedocs.io/en/latest/notebooks/lightning_examples/reinforce-learning-DQN.html) con qualche modifica.
Iniziamo con delle import:
import os
from collections import OrderedDict, deque, namedtuple
from typing import List, Tuple, Iterator
import gym
import numpy as np
import torch
from pytorch_lightning import LightningModule, Trainer
from pytorch_lightning.utilities import DistributedType
from torch import Tensor, nn
from torch.optim import Adam, Optimizer
from torch.utils.data import DataLoader
from torch.utils.data.dataset import IterableDataset
Definiamo adesso la Deep Q-Network per approssimare Q. E’ un semplice MLP che prende in input le 4 osservazioni e restituisce due valori, uno per ogni azione.
class DQN(nn.Module):
"""Deep Q-Network. E' un semplice MLP che prende
in input un vettore di osservazioni (lo stato) e restituisce in output
i Q-value per le diverse azioni"""
def __init__(self,
obs_size, # dimensioni del vettore di osservazioni
n_actions, # numero di azioni
hidden_size = 128 # dimensione del livello nascosto
):
super().__init__()
# definiamo il MLP
self.net = nn.Sequential(
nn.Linear(obs_size, hidden_size),
nn.ReLU(),
nn.Linear(hidden_size, n_actions),
)
def forward(self, x):
return self.net(x.float())
Testiamo la rete:
model = DQN(4, 2)
model(torch.zeros(1,4)).shape
torch.Size([1, 2])
Definiamo adesso una struttura per memorizzare le esperienze. Ogni esperienza è relativa a uno step di interazione di un episodio. L’esperienza per noi sarà una tupla composta da stato, azione, reward, un flag “done” che indica se dopo questa esperienza l’episodio è finito, e lo stato successivo.
# Una namedtuple per rappresentare una experience
Experience = namedtuple(
"Experience",
field_names=["state", "action", "reward", "done", "new_state"],
)
Definiamo adesso un ReplayBuffer, che sarà sostanzialmente una coda di tuple Experience nella quale è possibile inserire elementi e dalla quale è possibile campionare.
class ReplayBuffer:
"""Buffer che contine le esperienze già viste per effettuare il replay"""
def __init__(self, capacity):
# capacity indica la grandezza massima del buffer
# deque è una coda accessibile da ambo i lati
self.buffer = deque(maxlen=capacity)
def __len__(self):
return len(self.buffer)
def append(self, experience):
# permette di inserire una esperienza
self.buffer.append(experience)
def sample(self, batch_size):
# campiona batch_size esperienze casualmente
# ottiene batch_size indici senza sostituzione
indices = np.random.choice(len(self.buffer), batch_size, replace=False)
# preleva lista di stati, azioni, reward, booleani "done" e next_states
states, actions, rewards, dones, next_states = zip(*(self.buffer[idx] for idx in indices))
return ( #restituisci batch delle diverse quantità
np.array(states),
np.array(actions),
np.array(rewards, dtype=np.float32),
np.array(dones, dtype=np.bool),
np.array(next_states),
)
Costruiamo adesso un oggetto dataset per campionare dal replay buffer. Il dataset sarà di tipo IterableDataset e quindi non avrà un numero preciso di elementi. Dato che il dataset contiene un riferimento al replay buffer, questo si aggiornerà automaticamente man mano che inseriamo esperienze nel buffer.
class RLDataset(IterableDataset):
"""Dataset di tipo Iterable. Si tratta di un dataset 'infinito'.
Verrà aggiornato in automatico quando inseriremo elementi dentro il buffer"""
def __init__(self,
buffer, # replay buffer
sample_size = 200 # numero di memories da campionare ad ogni step
):
self.buffer = buffer
self.sample_size = sample_size
def __iter__(self):
# campiona le esperienze
states, actions, rewards, dones, new_states = self.buffer.sample(self.sample_size)
for i in range(len(dones)): #restituisci stati, azioni, reward, done e new_states, uno ad uno
yield states[i], actions[i], rewards[i], dones[i], new_states[i]
Definiamo ora una classe Agent che ci permetterà di simulare le interazioni con l’ambiente. L’agente ingloberà l’ambiente stesso e conterà un riferimento al replay buffer.
class Agent:
"""Questa classe implementa l'agente di reinforcement learning
e le sue interazioni con l'ambiente"""
def __init__(self,
env, #l'ambiente di gym
replay_buffer #il replay buffer
):
self.env = env
self.replay_buffer = replay_buffer
self.episodes = -1
self.reset()
def reset(self):
"""Resetta l'ambiente e salva lo stato corrente"""
self.state = self.env.reset()
self.episodes+=1
def get_action(self,
net, # la Q-Net
epsilon, # probabilità di effettuare una azione casuale per bilanciare exploration/exploitation
device # il dispositivo sul quale effettuare la computazione
):
# con probabilità epsilon
if np.random.random() < epsilon:
# campiona una azione casuale
action = self.env.action_space.sample()
else:
# trasforma l'ultimo stato in tensore
state = torch.tensor([self.state])
# metti lo stato sul device corretto
if device not in ["cpu"]:
state = state.cuda(device)
# ottieni i q values
q_values = net(state)
# campiona l'azione con q-alue più alto
_, action = torch.max(q_values, dim=1)
# trasforma l'azione in intero
action = int(action.item())
return action
@torch.no_grad() #disabilita i gradienti
def play_step(
self,
net, # la q-net
epsilon = 0.0, # probabilità di una azione random
device = "cpu", # il device su cui lavorare
):
# ottieni l'azione per lo stato corrente
action = self.get_action(net, epsilon, device)
# effettua uno step dell'environment di gym
new_state, reward, done, _ = self.env.step(action)
# costruiamo una nuova esperienza
exp = Experience(self.state, action, reward, done, new_state)
# aggiungiamola al buffer
self.replay_buffer.append(exp)
# conserviamo il nuovo stato come corrente
self.state = new_state
if done: # se l'episodio è finito
self.reset() #resettiamo l'ambiente
return reward, done
@torch.no_grad()
def play_episode(self, net, epsilon=0, device = "cpu", return_frames=True):
"""Questo metodo permette di eseguire un episodio completo. E' utile per visualizzare il comportamento dell'agente."""
self.reset()
total_reward = 0
frames = []
actions = []
for t in count():
# ottieni l'azione per lo stato corrente
action = self.get_action(net, epsilon, device)
# effettua uno step dell'environment di gym
new_state, reward, done, _ = self.env.step(action)
# conserviamo il nuovo stato come corrente
self.state = new_state
total_reward += reward
if return_frames:
frames.append(self.env.render(mode='rgb_array'))
actions.append(action)
if done:
self.reset()
break
return frames, actions, total_reward
Definiamo quindi il modulo di tipo LightningModule per effettuare il training del modello:
from itertools import count
class DQNLightning(LightningModule):
def __init__(
self,
Agent = Agent,
DQN = DQN,
ReplayBuffer = ReplayBuffer,
batch_size = 256, # il batch size con cui allenare la rete
lr = 1e-2, # learning rate
env = "CartPole-v0", # environment di gym
gamma = 0.99, # iperprametro gamma
sync_rate = 10, # ogni quanto aggiorare la target network
replay_size = 1000, # dimensione massima del replay buffer
warm_start_size = 1000, # quanti campioni usare per riempire il buffer all'inizio del training
eps_last_frame = 1000, # dopo quanti frame iniziare a far decadere epsilon
eps_start = 1.0, # epsilon iniziale
eps_end = 0.01, # epsilon finale
warm_start_steps = 1000, # massima reward nell'ambiente
display_rate = 20 #ogni quanti episodi, mostrare un episodio a schermo
):
super().__init__()
self.save_hyperparameters() #salviamo gli iperparametri
self.env = gym.make(self.hparams.env) #creiamo l'ambiente di gym
obs_size = self.env.observation_space.shape[0] #numero di osservazioni
n_actions = self.env.action_space.n #numero di azioni
self.net = DQN(obs_size, n_actions) #Q-Net
self.target_net = DQN(obs_size, n_actions) #rete target
self.buffer = ReplayBuffer(self.hparams.replay_size) #buffer
self.agent = Agent(self.env, self.buffer) #agente
self.total_reward = 0 #reward totale
self.episode_reward = 0 #reward dell'ultimo episodio
self.populate(self.hparams.warm_start_steps) #riempie il memory buffer
def populate(self, steps = 1000):
for i in range(steps): # effettua 1000 step con policy random
self.agent.play_step(self.net, epsilon=1.0)
self.agent.episodes=0
def forward(self, x):
output = self.net(x)
return output
def dqn_mse_loss(self, batch):
# calcola la loss MSE per allenare la rete
states, actions, rewards, dones, next_states = batch
# otteniamo i valori relativi alle azioni effettuate
state_action_values = self.net(states).gather(1, actions.unsqueeze(-1)).squeeze(-1)
with torch.no_grad():
# stimiamo i valori degli stati futuri con la target net
next_state_values = self.target_net(next_states).max(1)[0]
# impostiamo a zero i valori degli ultimi step
next_state_values[dones] = 0.0
# scolleghiamo dal grafo computazionale
next_state_values = next_state_values.detach()
# calcoliamo i valori attesi degli stati
expected_state_action_values = next_state_values * self.hparams.gamma + rewards
# restituiamo la loss MSE tra gli stati stimati e quelli attesi
return nn.MSELoss()(state_action_values, expected_state_action_values)
def training_step(self, batch, batch_idx):
device = self.get_device(batch) # otteniamo il device del batch
epsilon = max( # calcoliamo epsilon usando il global_step corrente
self.hparams.eps_end,
self.hparams.eps_start - self.global_step / self.hparams.eps_last_frame,
)
# esegui un nuovo step in modo da continuare a riempire il buffer
reward, done = self.agent.play_step(self.net, epsilon, device)
self.episode_reward += reward # cumula la reward dell'episodio corrente
# calcola la loss di training a partire dal batch
loss = self.dqn_mse_loss(batch)
# reshape necessario per alcuni tipi di training
if self.trainer._distrib_type in {DistributedType.DP, DistributedType.DDP2}:
loss = loss.unsqueeze(0)
# se abbiamo finito
if done:
# imposta la reward totale
self.total_reward = self.episode_reward
self.episode_reward = 0 #reimposta la reward dell'episodio
# aggiorna la target_net ogni sync_rate step
if self.global_step % self.hparams.sync_rate == 0:
self.target_net.load_state_dict(self.net.state_dict())
log = {
"total_reward": torch.tensor(self.total_reward).to(device),
"reward": torch.tensor(reward).to(device),
"train_loss": loss,
}
status = {
"steps": torch.tensor(self.global_step).to(device),
"total_reward": torch.tensor(self.total_reward).to(device),
}
self.log('train/loss', loss)
self.log('train/total_reward', self.total_reward)
self.log('train/episodes', self.agent.episodes)
# ogni display_rate episodi, mostriamo un episodio completo a schermo
if self.agent.episodes % self.hparams.display_rate == 0:
frames, actions, total_reward = self.agent.play_episode(self.net, device=self.get_device(batch))
vid_tensor = torch.from_numpy(np.stack(frames,0).transpose(0,3,1,2)/255).unsqueeze(0)
self.logger.experiment.add_video('val/episode', vid_tensor, global_step=self.global_step, fps=30)
return OrderedDict({"loss": loss, "log": log, "progress_bar": status})
def configure_optimizers(self):
# configura l'ottimizzatore
optimizer = Adam(self.net.parameters(), lr=self.hparams.lr)
return [optimizer]
def __dataloader(self):
# crea un RLDataset e lo lega al buffer
dataset = RLDataset(self.buffer)
dataloader = DataLoader( #costruisci il dataloader
dataset=dataset,
batch_size=self.hparams.batch_size,
)
return dataloader
def train_dataloader(self):
# restituisci il dataloader
return self.__dataloader()
def get_device(self, batch):
# restituisce il device del batch
return batch[0].device.index if self.on_gpu else "cpu"
Per poter visualizzare brevi video su tensorboard, installiamo moviepy con:
pip install moviepy
Effettuiamo dunque il training:
from pytorch_lightning.loggers import TensorBoardLogger
model = DQNLightning()
logger = TensorBoardLogger("tb_logs_rl", name="cartpole")
trainer = Trainer(
gpus=1,
max_epochs=10000, #facciamo training per 10000 step
logger=logger,
enable_progress_bar=False
)
trainer.fit(model)
GPU available: True, used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0,1,2,3]
| Name | Type | Params
------------------------------------
0 | net | DQN | 898
1 | target_net | DQN | 898
------------------------------------
1.8 K Trainable params
0 Non-trainable params
1.8 K Total params
0.007 Total estimated model params size (MB)
Alla fine del training, su tensorboard vedremo dei grafici simili ai seguenti:
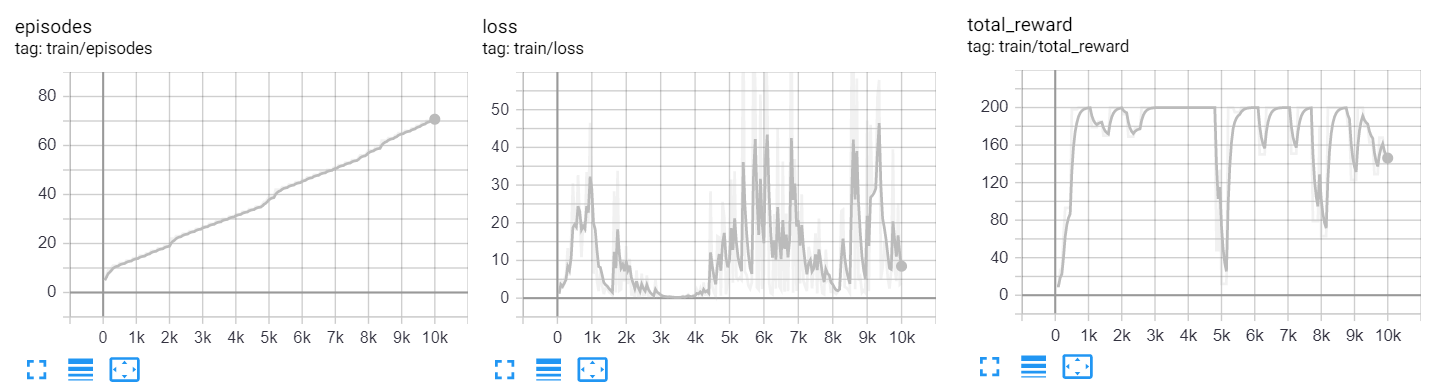
| Domanda 3 Come mai l’andamento del numero di episodi non è perfettamente lineare rispetto all’andamento del numero di iterazioni? |
| Domanda 4 Si commenti il grafico della total reward. Il modello sta apprendendo? |
Inoltre, cliccando su “images”, vedremo delle animazioni degli episodi mostrati durante il training:
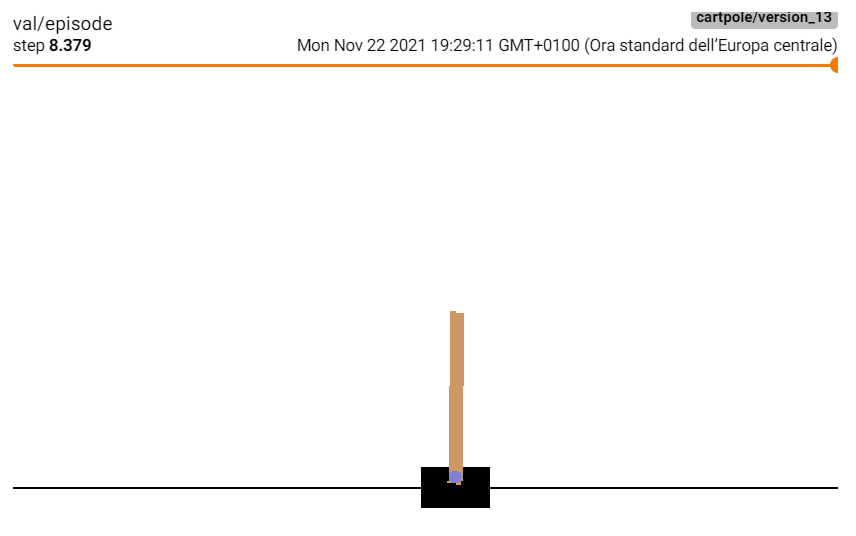
| Domanda 5 Si confrontino gli episodi visualizzati all’inizio del training con quelli visualizzati alla fine. Ci sono delle differenze? |
2.2 Valutazione
Per valutare le performance del modello, calcoliamo la total reward media per $100$ episodi:
avg_reward = 0
for _ in range(100):
_, _, total_reward = model.agent.play_episode(model.net, return_frames=False)
avg_reward+=total_reward
avg_reward/=100
print(avg_reward)
167.43
Confrontiamo la reward media ottenuta con quella di una policy random. Per ottenerla specificheremo epsilon=1:
avg_reward = 0
for _ in range(100):
_, _, total_reward = model.agent.play_episode(model.net, return_frames=False, epsilon=1)
avg_reward+=total_reward
avg_reward/=100
print(avg_reward)
23.6
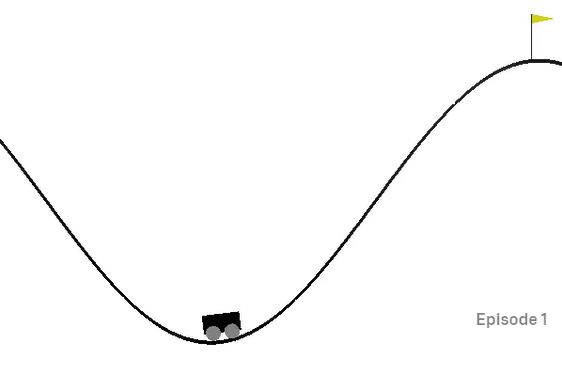
3. Mountain Car
Vediamo adesso un secondo esempio con il task “Mountain Car”. In questo caso, l’agente comanda un carrello che deve scalare una montagna. Il motore del carrello non ha potenza sufficiente a scalare la montagna, quindi l’agente deve imparare ad andare in direzione opposta a quella del traguardo per “prendere la rincorsa”.
Dalla pagina del task (https://github.com/openai/gym/wiki/MountainCar-v0), vediamo che le osservazioni sono due:
| Num | Observation | Min | Max |
|---|---|---|---|
| 0 | position | -1.2 | 0.6 |
| 1 | velocity | -0.07 | 0.07 |
Mentre le azioni disponibili sono tre:
| Num | Action |
|---|---|
| 0 | push left |
| 1 | no push |
| 2 | push right |
L’agente riceve una reward pari a $-1$ per ogni time step, finché il carrello non raggiunge il traguardo, dopo di ché nessuna penalità viene data e l’episodio termine. Non c’è alcuna penalità per il fatto di scalare la collina sinistra, che una volta raggiunta si comporta come un muro.
| Domanda 6 In che modo le reward definite favoriscono l’apprendimento di una policy funzionante? |
Possiamo affrontare il problema nuovamente con il Q-Learning, sfruttando lo stesso codice scritto per il problema del Cart Pole:
from pytorch_lightning.loggers import TensorBoardLogger
model = DQNLightning(env='MountainCar-v0')
logger = TensorBoardLogger("tb_logs_rl", name="mountain_car")
trainer = Trainer(
gpus=1,
max_epochs=10000, #facciamo training per 10000 step
logger=logger,
enable_progress_bar=False
)
trainer.fit(model)
GPU available: True, used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0,1,2,3]
| Name | Type | Params
------------------------------------
0 | net | DQN | 771
1 | target_net | DQN | 771
------------------------------------
1.5 K Trainable params
0 Non-trainable params
1.5 K Total params
0.006 Total estimated model params size (MB)
Alla fine del training, troveremo i seguenti log su tensorboard:
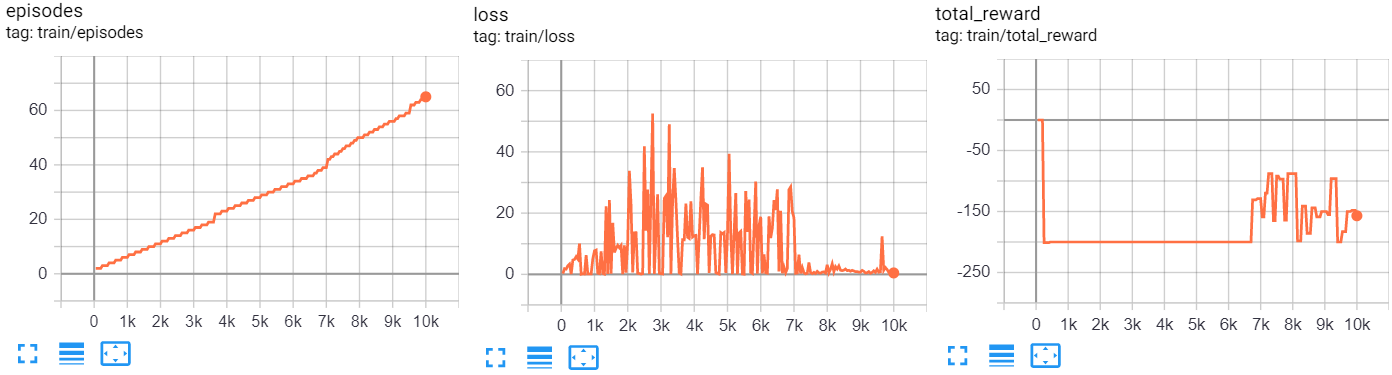
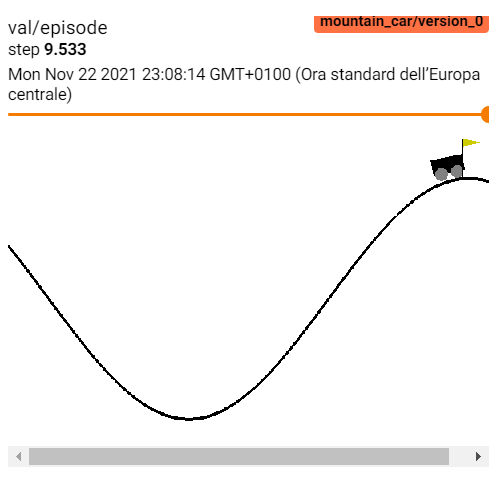
Su images, dovrebbero inoltre apparire gli episodi mostrati durante il training:
4. Acrobot
Vediamo un ulteriore task di esempio, Acrobot. In questo caso l’agente comanda un braccio robotico e ha lo scopo di portarlo al di sopra della linea orizzontale nera (si veda qui: https://www.analyticsvidhya.com/blog/2021/06/acrobot-with-deep-q-learning/):

L’agente ha a disposizione tre azioni:
- Applicare una torsione positiva;
- Applicare una torsione negativa;
- Non fare niente.

L’ambiente restituisce una reward negativa per ogni timestep, finché l’obiettivo o il numero massimo di step non vengono raggiunti.
| Domanda 7 In che modo le reward definite favoriscono l’apprendimento di una policy funzionante? |
Anche in questo caso, utilizzeremo lo stesso codice visto per i task precedenti:
from pytorch_lightning.loggers import TensorBoardLogger
model = DQNLightning(env='Acrobot-v1')
logger = TensorBoardLogger("tb_logs_rl", name="acrobot")
trainer = Trainer(
gpus=1,
max_epochs=10000, #facciamo training per 10000 step
logger=logger,
enable_progress_bar=False
)
trainer.fit(model)
GPU available: True, used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0,1,2,3]
| Name | Type | Params
------------------------------------
0 | net | DQN | 1.3 K
1 | target_net | DQN | 1.3 K
------------------------------------
2.6 K Trainable params
0 Non-trainable params
2.6 K Total params
0.010 Total estimated model params size (MB)
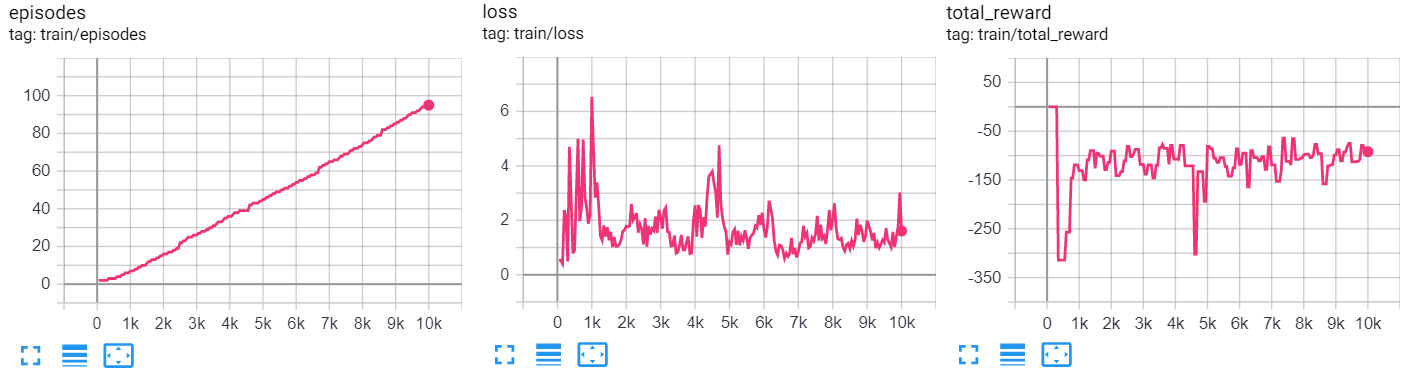
Alla fine del training, troveremo i seguenti log su tensorboard:
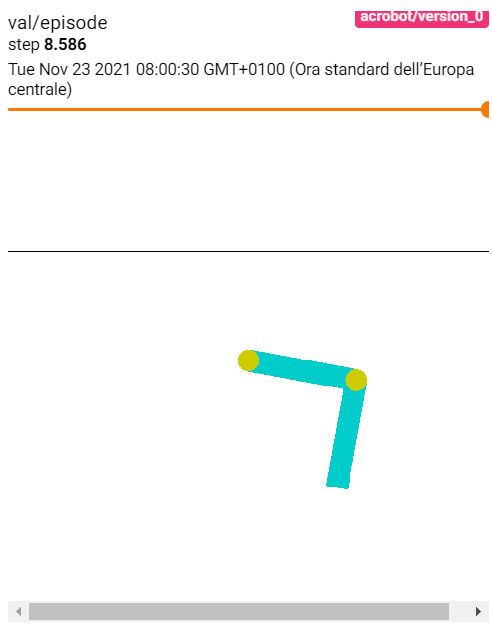
Alla fine del training, su “images” troveremo degli esempi di episodi mostrati durante il training:
Esercizi
 | Esercizio 1 Si provi a ottimizzare l’architettura della rete che risolve il problema cartpole per migliorare le prestazioni dell’algoritmo. Si riesce far convergere l’algoritmo in un numero inferiore di episodi? |
| Esercizio 2 Si ripeta l’esercizio precedente con il problema MountainCar. |
| Esercizio 3 Si ripeta l’esercizio precedente con il problema Acrorobot. |
| Esercizio 4 Si segua il tutorial disponibile a questo url (https://pytorch.org/tutorials/intermediate/mario_rl_tutorial.html) per implementare un agente di reinforcement learning capace di giocare a Super Mario. |
| Esercizio 5 Si rifattorizzi il codice dell’esercizio precedente in modo da usare PyTorch Lightning e seguendo una struttura simile a quella vista in questo laboratorio. |
References
- Documentazione di PyTorch. http://pytorch.org/docs/stable/index.html
- Documentazione di PyTorch Lightning. https://www.pytorchlightning.ai/
- Documentazione di Gym. https://gym.openai.com/docs/
- Tutorial su deep Q-Learning e PyTorch. https://pytorch.org/tutorials/intermediate/reinforcement_q_learning.html
- Tutorial su deep Q-Learning e Lightning. https://pytorch-lightning.readthedocs.io/en/latest/notebooks/lightning_examples/reinforce-learning-DQN.html
- Tutorial su deep reinforcement learning e Super Mario. https://pytorch.org/tutorials/intermediate/mario_rl_tutorial.html
- Acrobot con Deep Q-Learning. https://www.analyticsvidhya.com/blog/2021/06/acrobot-with-deep-q-learning/