10. Linear Regression#
Linear regression is a fundamental and widely used statistical technique in data analysis and machine learning. It is a powerful tool for modeling and understanding the relationships between variables. At its core, linear regression aims to establish a linear relationship between a dependent variable (the one you want to predict) and one or more independent variables (the ones used for prediction). This technique allows us to make predictions, infer associations, and gain insights into how changes in independent variables influence the target variable. Linear regression is both intuitive and versatile, making it a valuable tool for tasks ranging from simple trend analysis to more complex predictive modeling and hypothesis testing.
In this context, we will explore the concepts and applications of linear regression, its different types, and how to implement it using Python.
10.1. The Auto MPG Dataset#
We will consider the Auto MPG dataset, which contains \(398\) measurements of \(8\) different properties of different cars:
| displacement | cylinders | horsepower | weight | acceleration | model_year | origin | mpg | |
|---|---|---|---|---|---|---|---|---|
| 0 | 307.0 | 8 | 130.0 | 3504 | 12.0 | 70 | 1 | 18.0 |
| 1 | 350.0 | 8 | 165.0 | 3693 | 11.5 | 70 | 1 | 15.0 |
| 2 | 318.0 | 8 | 150.0 | 3436 | 11.0 | 70 | 1 | 18.0 |
| 3 | 304.0 | 8 | 150.0 | 3433 | 12.0 | 70 | 1 | 16.0 |
| 4 | 302.0 | 8 | 140.0 | 3449 | 10.5 | 70 | 1 | 17.0 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 393 | 140.0 | 4 | 86.0 | 2790 | 15.6 | 82 | 1 | 27.0 |
| 394 | 97.0 | 4 | 52.0 | 2130 | 24.6 | 82 | 2 | 44.0 |
| 395 | 135.0 | 4 | 84.0 | 2295 | 11.6 | 82 | 1 | 32.0 |
| 396 | 120.0 | 4 | 79.0 | 2625 | 18.6 | 82 | 1 | 28.0 |
| 397 | 119.0 | 4 | 82.0 | 2720 | 19.4 | 82 | 1 | 31.0 |
398 rows × 8 columns
Here is a description of the different variables:
Displacement: The engine’s displacement (in cubic inches), which indicates the engine’s size and power.
Cylinders: The number of cylinders in the engine of the car. This is a categorical variable.
Horsepower: The engine’s horsepower, a measure of the engine’s performance.
Weight: The weight of the car in pounds.
Acceleration: The car’s acceleration (in seconds) from 0 to 60 miles per hour.
Model Year: The year the car was manufactured. This is often converted into a categorical variable representing the car’s age.
Origin: The car’s country of origin or manufacturing. Car Name: The name or identifier of the car model.
MPG (Miles per Gallon): The fuel efficiency of the car in miles per gallon. It is the variable to be predicted in regression analysis.
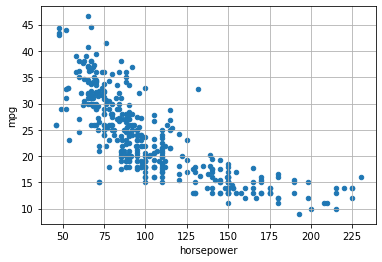
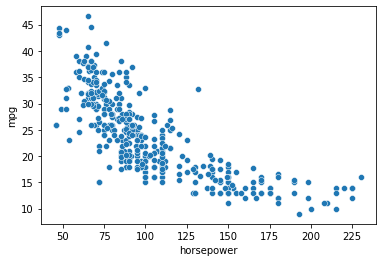
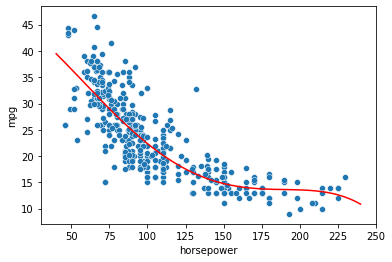
We will start by exploring the relationship between the variables horsepower and MPG. Let’s visualize the related scatterplot:
10.2. Regression Models#
Regression models, in general, aim to study the relationship between two variables, \(X\) and \(Y\), by defining a mathematical model \(f\) such that:
Here:
\(f\) is a deterministic function which can be used to predict the values of \(Y\) from the values of \(X\);
\(\epsilon\) is an error term, i.e., a variable capturing everything that is not captured by the deterministic function \(f\). It can be due to different reasons, the main of which are:
\(f\) is not an accurate deterministic function of the process. Since we don’t know the “true” function \(f\) and we are only estimating it, we may obtain a suboptimal \(f\) for which \(Y \neq f(X)\). The error term captures the differences between our predictions and the true values.
\(Y\) cannot only be predicted from \(X\), but some other variable is needed to correctly predict \(Y\) from \(X\). For instance, \(X\) could be “years of education” and \(Y\) can be “income”. While may expect that “income” is not completely predicted from “years of education”. This can happen also because we don’t always have observations for all relevant variables.
the problem has inherent stochasticity which cannot be entirely modeled within the deterministic function \(f\). For instance, consider the problem of predicting the rate of wins in poker based on the expertise of the player. The expertise surely allows to predict the rate of wins, but wins partially depend also on random factors, such as how the deck was shuffled.
Note that, often, we model \(f\) in a way that we have its analytical form. This is very powerful. If we have the analytical form of the function \(f\) which explains how \(Y\) is influenced from \(X\) (can be predicted from \(X\)), then we can really understand deeply the connection between the two variables!
The function \(f\) can take different forms. The most common one is the linear form that we will see in the next section. While the linear form is very simple (and hence we can anticipate it will be a limited model in many cases), it has the great advantage to be easy to interpret.
10.3. Simple Linear Regression#
Simple linear regression aims to model the linear relationship between two variables \(X\) and \(Y\). In our example dataset, we will consider \(X=\text{horsepower}\) and \(Y=\text{mpg}\).
Since we are trying to model a linear relationship, we can imagine a line passing through the data. The simple linear regression model is defined as:
In our example:
It is often common to introduce a “noise” variable which captures the randomness due to which the expression above is approximated and write:
As we will see later, we expect \(\epsilon\) to be small and randomly distributed.
Given the model above, we will call:
\(X\), the dependent variable or regressor;
\(Y\), the independent variable or regressed variable.
The values \(\beta_0\) and \(\beta_1\) are called coefficients or parameters of the model.
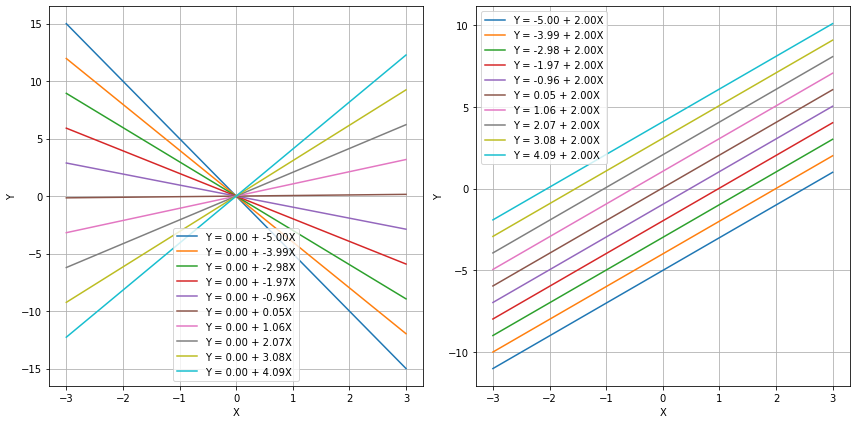
The mathematical model above has a geometrical interpretation. Indeed, specific values of \(\beta_0\) and \(\beta_1\) identify a given line in the 2D plane, as shown in the plot below:
We hence aim to estimate two appropriate values \(\hat \beta_0\) and \(\hat \beta_1\) from data in a way that they provide a model which represent well our data. In the case of our example, we expect the geometrical model to have this aspect:
This line will also be called the regression line.
10.3.1. Estimating the Coefficients - Ordinary Least Squares (OLS)#
To estimate the coefficients of our optimal model, we should first define what is a good model. We will say that a good model is one that predicts well the \(Y\) variable from the \(X\) one. We already know from the example above that, since the relationship is not perfectly linear, the model will make some mistakes.
Let \(\{(x_i,y_i)\}\) be our set of observations. Let
be the prediction of the model for the observation \(x_i\). For each data point \((x_i,y_i)\), we will define the deviation of the prediction from the \(y_i\) value as follows:
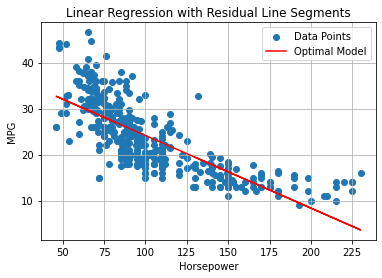
These numbers will be positive or negative based on whether we underestimate or overestimate the \(y_i\) values. As a global error indicator for the model, given the data, we will define the residual sum of squares (RSS) as:
or equivalently:
This number will be the sum of the square values of the dashed segments in the plot below:
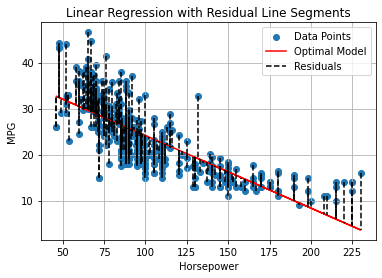
Intuitively, if we minimize these numbers, we will find the line which best fits the data.
We can obtain estimates for \(\hat \beta_0\) and \(\hat \beta_1\) by minimizing the RSS using an approach called ordinary least squares.
We can write the RSS as a function of the parameters to estimate:
This is also called a cost function or loss function.
We aim to find:
The minimum can be found setting:
Doing the math, it can be shown that:
10.3.2. Interpretation of the Coefficients of Linear Regression#
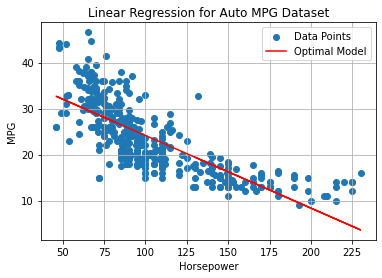
Using the formulas above, we find the following values for the example above:
beta_0: 39.94
beta_1: -0.16
These parameters identify the following line:
The plot below shows the line on the data:
Apart from the geometric interpretation, the coefficients of a linear regressor have an important statistical interpretation. In particular:
The intercept \(\beta_0\) is the value of \(y\) that we get when the input value \(x\) is equal to zero \(x=0\) (i.e., \(f(0)\)). This value may not always make sense. For instance, in the example above, we have: \(\beta_0 = 39.94\), which means that, when the horsepower is \(0\), then the consumption in mpg is equal to \(39.94\).
The coefficient \(\beta_1\) indicates the steepness of the curve. If \(\beta_1\) is large, then the curve is steep. This indicates that a small change in \(x\) is associates to a large change in \(y\). In general, we can see that:
which reveals that when we observe an increment of one unit of x, we observe an increment of \(\beta_1\) units in y. In our example, \(\beta_1=-0.15\), hence we can say that, for cars with one additional unit of horsepower, we observe an drop in mps \(-0.15\) units.
10.3.3. Accuracy of the Coefficient Estimates#
Recall that we are trying to model the relationship between two random variables \(X\) as \(Y\) with a simple linear model:
This means that, once we find appropriate values of \(\beta_0\) and \(\beta_1\), we expect these to summarize the linear relationship in the population or the population regression line. Also, recall that these values are obtained using two formulas which are based on realizations of \(X\) of \(Y\) and can be hence seen as estimators:
We now recall that, being estimates, they provide values related to a given realization of the random variables.
Let us consider an ideal population for which:
Ideally, given a sample from the population, we expect to obtain \(\hat \beta_0 \approx 1\) and \(\hat \beta_1 \approx 2\). In practice, different samples may lead to different estimates and hence different regression lines, as shown in the plot below:
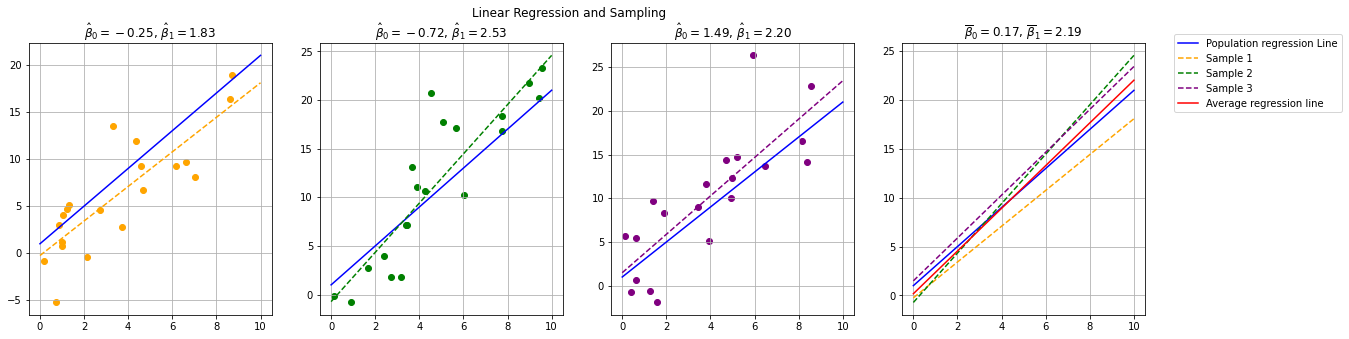
Each of the first three subplots shows a different sample drawn from the population, with its corresponding estimated regression line, along with the true population regression line. The last subplot compares the different estimated lines with the population regression line and the average regression line (in red). Coefficient estimates are shown in the subplot titles.
As can be noted, each estimate can be inaccurate, while the average regression line is very close to the population regression line. This is due to the fact that our estimators for the parameters of the regression coefficients have non-zero variance. In practice, in can be shown that these estimators are unbiased (hence the average regression line is close to the population line).
10.3.3.1. Standard Errors of the Regression Coefficients#
A natural question is hence “how do we assess how good our estimates of the regression coefficients are”. We resort here to statistical inference. It can be shown that the squared standard errors associated to the coefficient estimates are:
Where:
Note that \(\sigma^2\) is generally unknown, but it can be estimated as the residual standard error:
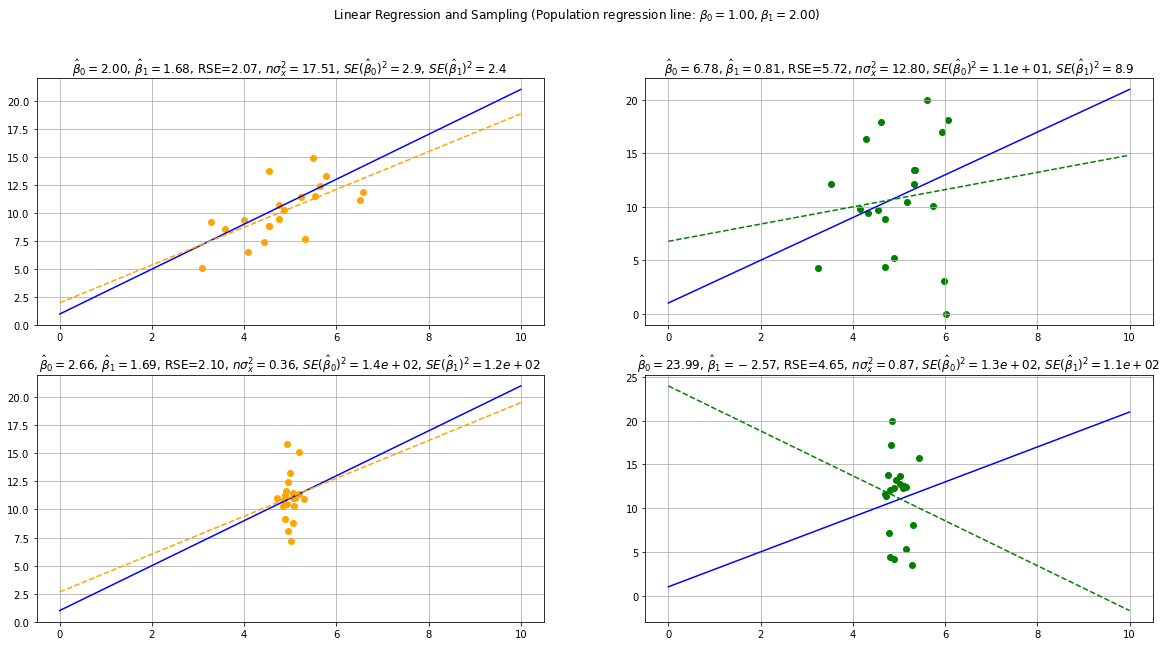
In the formulas above, we see that:
The standard errors are proportional to \(\sigma^2\). This is expected, as we will have more uncertainty when the variance of the error term is high, hence when the points are more scattered around the population regression line.
The standard errors depend inversely on \(n\sigma_x^2 = \sum_{i=1}^n(x_i-\overline x)\) (the variance of \(x\) multiplied by the sample size). This means that we will have more uncertainty in the estimates if \(x\) concentrate in a narrow range.
The plot below shows some examples of fit for different values of \(RSE\) and \(n\sigma_x^2\):
10.3.3.2. Confidence Intervals of the Regression Coefficients#
As we have seen, standard errors allow to compute confidence intervals. We will not see it into details, but it turns out that the true values will be in the following intervals with a \(95\%\) confidence:
In practice, it is common to compute confidence intervals with a \(95\%\) confidence. In the case of our model:
We will have:
COEFFICIENT |
STD ERROR |
CONFIDENCE INTERVAL |
|
|---|---|---|---|
\(\beta_0\) |
39.94 |
0.717 |
\([38.53, 41.35]\) |
\(\beta_1\) |
-0.1578 |
0.006 |
\([-0.17, -0.15]\) |
From the table above, we can say that:
The value of
mpgforhorsepower=0lies somewhere between \(38.53\) and \(41.35\);An increase of
horsepowerby one unit is associated to an decrease ofmpgbetween \(-0.17\) and \(.015\).
It is also common to see plots like the following one:
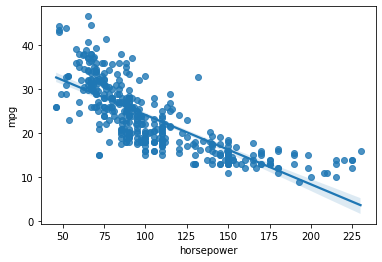
In the plot above, the shading around the line illustrates the variability induced by the confidence intervals estimated for the coefficients.
10.3.3.3. Statistical Tests for the Relevance of Coefficients#
Standard errors are also used to perform hypothesis tests on the coefficients. In practice, it is common to perform a statistical test to assess whether the coefficient \(\beta_1\) is significantly different from zero. It is interesting to check this because, if \(\beta_1\) was equal to zero, then there would not be any correlation between the variables (and hence the linear regressor would not be useful). Indeed, if \(\beta-1=0\):
Hence \(Y\) cannot be predicted from \(X\) and the two variables are not associated.
The null hypothesis of the test is as follows:
While the alternative hypothesis is formulated as follows:
To conduct the test, the following t-statistic is computed from the estimate of \(\beta_1\) and the standard error:
Where the \(-0\) term indicates that we are subtracting the value assumed by the null hypothesis (\(\beta_1=0\)). The statistic will follow a t-Student distribution with \(n-2\) degrees of freedom (\(n\) being the number of data points). If \(n>30\) the distribution is approximately Gaussian. Using this statistic, a \(p-value\) indicating the probability of observing a t statistic more extreme than this one if there is no associated between the two variables is computed. Chosen a significance level \(\alpha\) (often \(\alpha=0.05\)), we will reject the null hypothesis if \(p<\alpha\).
A similar test is conducted to check that \(\beta_0\) is significantly different from zero.
Let’s see the updated table from the same example:
COEFFICIENT |
STD ERROR |
t |
P>|t| |
CONFIDENCE INTERVAL |
|
|---|---|---|---|---|---|
\(\beta_0\) |
\(39.94\) |
\(0.717\) |
\(55.66\) |
\(0\) |
\([38.53, 41.35]\) |
\(\beta_1\) |
\(-0.1578\) |
\(0.006\) |
\(-24.49\) |
\(0\) |
\([-0.17, -0.15]\) |
From the table above, we can conclude that both \(\beta_0\) and \(\beta_1\) are significantly different than \(0\) (p-value is equal to zero). This can also be noted by the fact that the confidence intervals do not contain the zero number.
10.3.4. Accuracy of the Model#
The tests performed above will tell us if there is a relationship between the variables, but they will not tell us how well does the model fit the data. For instance, if the relationship between \(X\) and \(Y\) is not linear, we would expect the model not to fit the data very well. In practice, we can use different measures of accuracy of the model.
10.3.4.1. Residual Standard Error#
One way to measure how well the model fits the data is to check the variance of the residuals \(\epsilon\). Recall that our model is:
If the model fits the data well, then the values of \(\epsilon\) will be close to zero and their variance will be small. We have already seen that the Residual Sum of Squares (RSS) is defined as:
The residual standard error is a measure of the lack of fit. Large values will indicate that the model is not a good fit. For instance, in our example we have:
This value has to be interpreted depending on the scale of the \(Y\) variable. The average value of \(Y\) is:
So the percentage error will be \(4.91/23.52 \approx 20\%\).
10.3.4.2. \(R^2\) Statistic#
The RSE value is an absolute measure, which is measured in the units of \(Y\). Indeed, to interpret it, we had to check the range of the \(Y\) values. An alternative way to check if the model is fitting the data well, would be to compare the performance of our model with the performance of a baseline model which assumes no association between the \(X\) and \(Y\) variables. This model would be:
This model has a single parameter \(k\). The Residual Sum of Squares of this model would be:
To find the optimal value \(k\), we can compute the derivative of the RSS and set it to zero:
Hence, the optimal estimator, when there is not relationship between \(X\) and \(Y\) is the average value of \(Y\). We will call its RSS value the total sum of squares:
We can compare the RSS value obtained by our model to the TSS, which is the error of the baseline method:
This number will be comprised between 0 and 1, and in particular:
\(\frac{RSS}{TSS}=0\) when \(RSS=0\), i.e., we have a perfect model;
\(\frac{RSS}{TSS}=1\) when \(RSS=TSS\), i.e., we are not doing any better than the baseline model (so our model is poor).
Note that the RSS measures the variability in \(Y\) left unexplained after regression (the one that the model could not capture), while the TSS measures the total variability in \(Y\). The fraction hence explains the proportion of variability which the model could not explain.
We define the \(R^2\) statistic as:
Inverting by the \(1-\) subtraction, this number measures the proportion of variability in \(Y\) that can be explained using \(X\)
The plot below shows examples of linear regression fits with different \(R^2\) values.
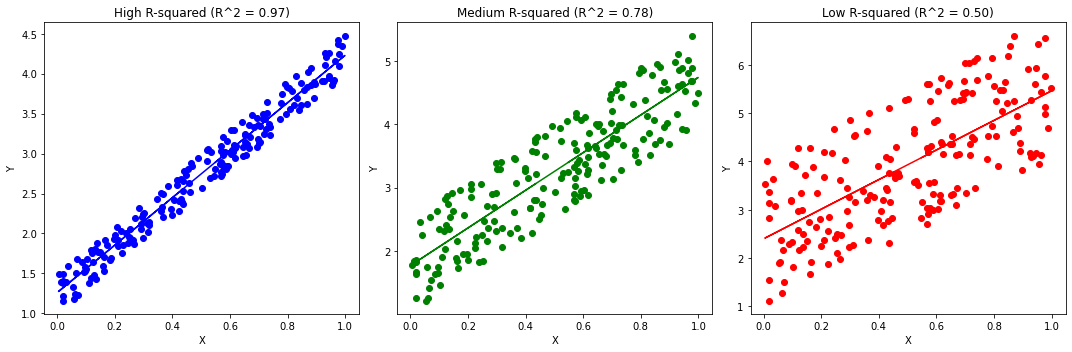
The interpretation of the \(R^2\) is related to the one of the Pearson’s \(\rho\) correlation coefficient. Indeed, both scores are independent of the slope of the regression line, but quantify how liner the relationship between \(X\) and \(Y\) is. In practice, it can be shown that:
The \(R^2\) value in our example of regressing mpg from horsepower is:
Which indicates that \(61\%\) of the variance of the \(Y\) variable is explained by the model.
10.4. Multiple Linear Regression#
In the example above, we have seen that about \(61\%\) of the variance in \(Y\) was explained by the model. One may wonder why about \(39\%\) of the variance could not be explained. Some common reasons may be:
There is stochasticity in the data which prevents us to learn an accurate function to predict \(Y\) from \(X\);
The relationship between \(X\) and \(Y\) is far from linear, so we cannot predict \(Y\) accurately;
The prediction of \(Y\) also depends on other variables.
While in general the unexplained variance is due to a combination of the aforementioned factors, the third one is often very common and relatively easy to fix. In our case, we are trying to predict mpg from horsepower. However, we can easily imagine how other variables may contribute to the estimation of mpg. For instance, two cars with the same horsepower but different weight may have different values of mpg. We can hence try to find a model with also uses weight to predict mpg. This is simply done by adding an additional coefficient for the new variable:
The obtained model is called multiple linear regression. If we fit this model (we will see how to estimate coefficients in this case), we obtain the following \(R^2\) value:
An increment of \(+0.1\)!
In general, we can include as many variables as we think is relevant to add and define the following model:
For instance, the following model:
Has an \(R^2\) value of:
10.4.1. Geometrical Interpretation#
The multiple regression model based on two variable has a geometrical interpretation. Indeed, the equation:
identifies a plane in the 3D space. We can visualize the plane identified by the \(mpg = \beta_0 + \beta_1 horsepower + \beta_2 weight\) model as follows:
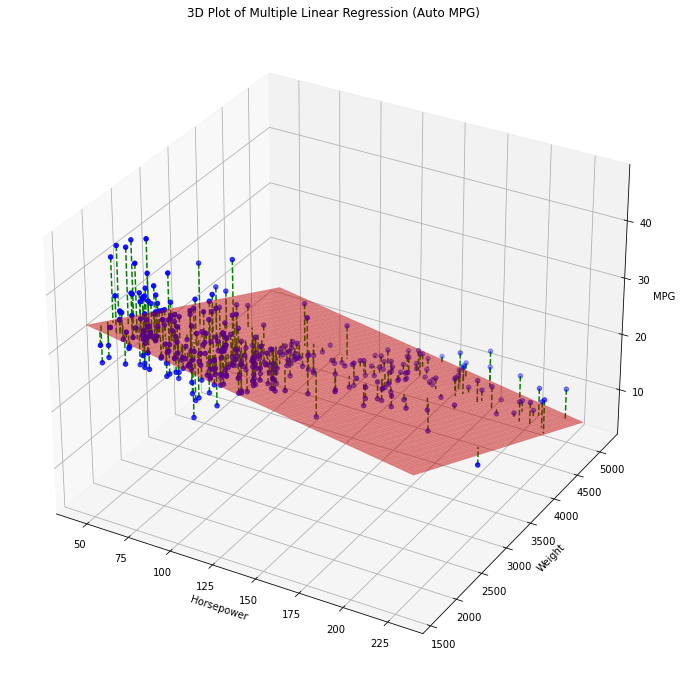
The dashed lines indicate the residuals. The best fit of the model minimizes again the sum of squared residuals. This model makes predictions selecting the \(Z\) value which intersect the plane for given values of \(X\) and \(Y\).
In general, when we consider \(n\) variables, the linear regressor will be a (n-1)-dimensional hyperplane in the n-dimensional space.
10.4.2. Statistical Interpretation#
The statistical interpretation of a multiple linear regression model is very similar to the interpretation of a simple linear regression model. Given the general model:
we can interpret the coefficients as follows:
The value of \(\beta_0\) indicates the value of \(y\) when all independent variables are set to zero;
The value of \(\beta_i\) indicates the increment of \(y\) that we expect to see when \(x_i\) increments by one unit, provided that all other values \(x_j | j\neq i\) are constant.
In the considered example:
we obtain the following estimates for the coefficients:
\(\hat \beta_0\) |
\(\hat \beta_1\) |
\(\hat \beta_2\) |
|---|---|---|
\(45.64\) |
\(-0.05\) |
\(-0.01\) |
We can interpret these estimates as follows:
Cars with zero
horsepowerand zeroweightwill have anmpgof \(45.64\) (\(\approx 19.4 Km/l\)).An increment of one unit of
horsepoweris associated to a decrement ofmpgof \(-0.05\) units, provided thatweightis constant. This makes sense: cars with morehorsepowerwill probably consume more fuel.An increment of one unit of
weightis associated to a decrement ofmpgof-0.01units, provided thathorsepoweris constant. This makes sense: heavier cars will consume more fuel.
Let’s compare the estimates above with the estimates of our previous model:
In that case, we obtained:
\(\hat \beta_0\) |
\(\hat \beta_1\) |
|---|---|
\(39.94\) |
\(-0.16\) |
We can note that the coefficients are different. This happens because, when we add more variables, the model explains variance in a different way. If we think more about it, this is coherent with the interpretation of the coefficients. Indeed:
\(39.94\) is the expected value of
mpgwhenhorsepower=0, but all other variables have unknown values. \(45.64\) is the expected value ofmpgwhenhorsepower=0andweight=0. This is different, as in the second case we are (virtually) looking at a subset of data for which both horsepower and weight are zero, while in the first case, we are only looking at data for whichhorsepower=0, butweightcan be any value. In some sense, we can see \(39.94\) as an average value for different values ofweight(and all other unobserved variables).\(-0.16\) is the expected increment of
mpgwhen we observe an increment of one unit ofhorsepowerand we don’t know anything about the values of the other variables. \(-0.05\) is the expected increment ofmpgwhenhorsepowerandweightare held constant, so, again, we are (virtually) looking at a different subset of the data in which the relationship betweenmpgandhorsepowermay be a bit different.
Note that, also in the case of multiple regression, we can estimate confidence intervals and perform statistical tests. In our example, we will get this table:
COEFFICIENT |
STD ERROR |
t |
P>|t| |
CONFIDENCE INTERVAL |
|
|---|---|---|---|---|---|
\(\beta_0\) |
\(45.64\) |
\(0.793\) |
\(57.54\) |
\(0\) |
\([44.08, 47.20]\) |
\(\beta_1\) |
\(-0.05\) |
\(0.011\) |
\(-4.26\) |
\(0\) |
\([-0.07, -0.03]\) |
\(\beta_2\) |
\(-0.01\) |
\(0.001\) |
\(-11.53\) |
\(0\) |
\([-0.007, -0.005]\) |
10.4.3. Estimating the Regression Coefficients#
Given the general model:
We can define our cost function again as the residual sum of squares:
The values \(\hat \beta_0,\ldots,\hat \beta_n\) values that minimize the loss function above are the multiple least square coefficient estimates.
To find these optimal values, it is convenient to use matrix notation. Given \(m\) observations, we will have \(m\) equations:
We can write the \(m\) equations in matrix form as follows:
where:
The matrix \(\mathbf{X}\) is called the design matrix.
In the notation above, we want to minimize:
It can be shown that, by the least squares method, the RSS is minimized by the estimate:
10.4.4. The F-Test#
When fitting a multiple linear regressor, it is common to perform a statistical test to check whether at least one of the regression coefficients is significantly different from zero (in the population). This test is called an \(F-test\). We define the null and alternative hypotheses as follows:
The null hypothesis (the one we want to reject with this test) is that all coefficients are zero in the population. If this is true, than the multiple regressor is not reliable and we should discard it. The alternative hypothesis is that at least one of the coefficients is different from zero.
The test is performed by computing the following F-statistic:
Where recall that \(n\) is the number of variables and \(m\) is the number of observations.
In practice, the F-statistic will be:
Close to \(1\) if there is no relationship between the response and the predictors (\(H_0\) is true);
Greater than \(1\) if \(H_a\) is true.
The test is carried out as usual, finding a p-value which indicates the probability to observe a statistic larger than the observed one if all regression coefficients are zero in the population.
In our example of regressing mpg from horsepower and weight, we will find:
\(R^2\) |
F-statistic |
Prob(F-statistic) |
|---|---|---|
0.706 |
467.9 |
3.06e-104 |
This indicates that the regressor is statistically relevant. The \(F-statistic\) is much larger than \(1\) and the p-value (Prob(F-statistic)) is very small (under the significance level \(\alpha = 0.05\)).
10.4.5. Variable Selection#
Let’s now try to fit a multiple linear regressor on our dataset by including all variables. Our dependent variable will be mpg, while the set of dependent variables will be:
['displacement' 'cylinders' 'horsepower' 'weight' 'acceleration'
'model_year' 'origin']
We obtain the following measures of fit:
\(R^2\) |
F-statistic |
Prob(F-statistic) |
|---|---|---|
0.821 |
252.4 |
2.04e-139 |
The regressor has a good \(R^2\) and the p-value of the F-test is very small. We can conclude that there is some relationship between the independent variables and the dependent one.
The estimates of the regression coefficients will be:
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| Intercept | -17.2184 | 4.644 | -3.707 | 0.000 | -26.350 | -8.087 |
| horsepower | -0.0170 | 0.014 | -1.230 | 0.220 | -0.044 | 0.010 |
| weight | -0.0065 | 0.001 | -9.929 | 0.000 | -0.008 | -0.005 |
| displacement | 0.0199 | 0.008 | 2.647 | 0.008 | 0.005 | 0.035 |
| cylinders | -0.4934 | 0.323 | -1.526 | 0.128 | -1.129 | 0.142 |
| acceleration | 0.0806 | 0.099 | 0.815 | 0.415 | -0.114 | 0.275 |
| model_year | 0.7508 | 0.051 | 14.729 | 0.000 | 0.651 | 0.851 |
| origin | 1.4261 | 0.278 | 5.127 | 0.000 | 0.879 | 1.973 |
From the table, we can see that not all predictors have a p-value below the significance level \(\alpha=0.05\). In particular:
horsepowerhas a large p-value of \(0.22\);cylindershas a large p-value of \(0.128\);accelerationhas a large p-value of \(0.415\).
This means that, within the current regressor, there is no meaningful relationship between these variables and mpg. A legitimate question is
How is it possible that
horsepoweris not associated tompgin this regressor if it was associated to it before?!
However, we should recall that, when we consider a different set of variables, the interpretation of the coefficients changes. So, even if in the previous models, horsepower was correlated to mpg, now it is not correlated anymore. We can imagine that the relationship between these variables is now explained by the other variables which we have introduced.
Even if the model is statistically significant, it does make sense to get rid of the variables with poor relationships with mpg. After all, if we remove a variable, the estimates of the other coefficients may change.
A common way to remove these variables is by backward selection or backward elimination. This consists in iteratively removing the variable with the largest p-value. We remove one variable at a time and re-compute the results, iterating until all variables have a small p-value.
let’s start by removing acceleration. This is the result:
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| Intercept | -15.5635 | 4.175 | -3.728 | 0.000 | -23.773 | -7.354 |
| horsepower | -0.0239 | 0.011 | -2.205 | 0.028 | -0.045 | -0.003 |
| weight | -0.0062 | 0.001 | -10.883 | 0.000 | -0.007 | -0.005 |
| displacement | 0.0193 | 0.007 | 2.579 | 0.010 | 0.005 | 0.034 |
| cylinders | -0.5067 | 0.323 | -1.570 | 0.117 | -1.141 | 0.128 |
| model_year | 0.7475 | 0.051 | 14.717 | 0.000 | 0.648 | 0.847 |
| origin | 1.4282 | 0.278 | 5.138 | 0.000 | 0.882 | 1.975 |
Note that the coefficients have changed. We now remove cylinders, which has the largest p-value of \(0.117\):
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| Intercept | -16.6939 | 4.120 | -4.051 | 0.000 | -24.795 | -8.592 |
| horsepower | -0.0219 | 0.011 | -2.033 | 0.043 | -0.043 | -0.001 |
| weight | -0.0063 | 0.001 | -11.124 | 0.000 | -0.007 | -0.005 |
| displacement | 0.0114 | 0.006 | 2.054 | 0.041 | 0.000 | 0.022 |
| model_year | 0.7484 | 0.051 | 14.707 | 0.000 | 0.648 | 0.848 |
| origin | 1.3853 | 0.277 | 4.998 | 0.000 | 0.840 | 1.930 |
All variables now have an acceptable p-value (\(\alpha=0.05\)). We are done. Note that, by removing the two variables, horsepower now has an acceptable p-value. This indicates that one of the removed variables was redundant with respect to horsepower.
10.4.6. Adjusted \(R^2\)#
While in the case of simple regression we saw that \(R^2=\rho\) (where \(\rho\) is the correlation coefficient), in the case of multiple regression, it turns out that:
In general, having more variables in the linear regressor will reduce the error term and improve the covariance between \(Y\) and \(\hat Y\), hence increasing the \(R^2\). However, in general having a small increase in \(R^2\) when we add a new variable may not be good. Indeed, we could prefer a simpler model with a slightly smaller \(R^2\) value.
To express this, we can compute the adjusted \(R^2\) as follows:
Where \(m\) is the number of data points and \(n\) is the number of independent variables. The \(\overline R^2\) re-balances the \(R^2\) accounting for the introduction of additional variables.
For instance the last model we fit has an \(R^2=0.820\) and \(\overline R^2=0.818\). We will see more in details how to use the \(\overline R^2\) in the laboratory.
10.5. Qualitative Predictors#
So far, we have studied relationships between continuous variables. In practice, linear regression allows to also study relationship between continuous dependent variables and qualitative independent variables. We will consider another dataset similar to the Auto MPG dataset:
| mpg | horsepower | fuelsystem | fueltype | length | cylinders | |
|---|---|---|---|---|---|---|
| 0 | 21 | 111.0 | mpfi | gas | 168.8 | 4 |
| 1 | 21 | 111.0 | mpfi | gas | 168.8 | 4 |
| 2 | 19 | 154.0 | mpfi | gas | 171.2 | 6 |
| 3 | 24 | 102.0 | mpfi | gas | 176.6 | 4 |
| 4 | 18 | 115.0 | mpfi | gas | 176.6 | 5 |
| ... | ... | ... | ... | ... | ... | ... |
| 200 | 23 | 114.0 | mpfi | gas | 188.8 | 4 |
| 201 | 19 | 160.0 | mpfi | gas | 188.8 | 4 |
| 202 | 18 | 134.0 | mpfi | gas | 188.8 | 6 |
| 203 | 26 | 106.0 | idi | diesel | 188.8 | 6 |
| 204 | 19 | 114.0 | mpfi | gas | 188.8 | 4 |
205 rows × 6 columns
In this case, besides having numerical variables, we also have qualitative ones such as fuelsystem and fueltype. Let’s see what are their unique values:
Fuel System: ['mpfi' '2bbl' 'mfi' '1bbl' 'spfi' '4bbl' 'idi' 'spdi']
Fuel Type: ['gas' 'diesel']
We will not see the meaning of all the values of fuelsystem, while the values of fueltype are self-explanatory.
10.5.1. Predictors with Only Two Levels#
We will first see the case in which qualitative predictors only have two levels. To handle these as independent variables, we can define a new dummy variable which will encode \(1\) as one of the two levels and \(0\) as the other one. For instance, we can introduce a fueltype[T.gas] variable defined as follows:
If we fit the model:
We obtain an \(R^2=0.661\) with \(Prob(F-statistic) \approx 0\) and the following estimates for the regression parameters:
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| Intercept | 41.2379 | 1.039 | 39.705 | 0.000 | 39.190 | 43.286 |
| fueltype[T.gas] | -2.7658 | 0.918 | -3.013 | 0.003 | -4.576 | -0.956 |
| horsepower | -0.1295 | 0.007 | -18.758 | 0.000 | -0.143 | -0.116 |
How do we interpret this result?
The value of
mpgwhenhorsepower=0fueltype=diesel(i.e.,fueltype[T.gas]=0) is \(41.2379\);An increase of one unit of
horsepoweris associated to a decrease of \(0.1295\) units ofmpgprovided thatfueltype=diesel;For gas vehicles we expect to see a decrease of
mpgequal to \(2.7658\) with respect to diesel vehicles.
10.5.2. Predictors with More than Two Levels#
When predictors have \(n\) levels, we need to introduce multiple dummy variables. Specifically, we need to introduce \(n-1\) binary variables. For instance, if the levels of the variable income are low, medium and high, we could introduce two variables income[T.low] and income[T.medium]. These are sufficient to express all possible values of income as shown in the table below:
|
|
|
|---|---|---|
|
1 |
0 |
|
0 |
1 |
|
0 |
0 |
Note that we could have introduced a new variable income[T.high] but this would have been redundant and so correlated to the other two variables, which is something we know we have to avoid in linear regression.
If we fit the model which predicts mpg from horsepower and fuelsystem we obtain \(R^2=0.734\), \(Prob(F-statistic) \approx 0\) and the following estimates for the regression coefficients:
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| Intercept | 38.8638 | 1.234 | 31.504 | 0.000 | 36.431 | 41.297 |
| fuelsystem[T.2bbl] | -1.6374 | 1.127 | -1.453 | 0.148 | -3.860 | 0.585 |
| fuelsystem[T.4bbl] | -12.0875 | 2.263 | -5.341 | 0.000 | -16.551 | -7.624 |
| fuelsystem[T.idi] | -0.3894 | 1.300 | -0.299 | 0.765 | -2.954 | 2.175 |
| fuelsystem[T.mfi] | -5.8285 | 3.661 | -1.592 | 0.113 | -13.049 | 1.392 |
| fuelsystem[T.mpfi] | -5.4942 | 1.202 | -4.570 | 0.000 | -7.865 | -3.123 |
| fuelsystem[T.spdi] | -5.2446 | 1.612 | -3.254 | 0.001 | -8.423 | -2.066 |
| fuelsystem[T.spfi] | -6.1522 | 3.615 | -1.702 | 0.090 | -13.282 | 0.978 |
| horsepower | -0.0968 | 0.009 | -11.248 | 0.000 | -0.114 | -0.080 |
As we can see, we have added different correlation coefficients in order to deal with the different levels. Not all predictors have a low p-value, so we can remove those with backward elimination. We will see some more examples in the laboratory.
10.6. Extensions of the Linear Model#
The linear model makes the very restrictive assumption that the the nature of the relationship between the variables is linear. However, in many cases, it is common to find relationships which deviate from this assumption. In the following sections, we will see some simple ways to deviate from these assumption within a linear regression model.
10.6.1. Interaction Terms#
A linear regression model assumes that the effect of the different independent variables to the prediction of the dependent variable is additive:
In some cases, however, it makes sense to assume the presence of interaction terms, i.e., terms in the model which account for the interactions between some variables. For instance:
As a concrete example, consider the problem of regressing mpg from horsepower and weight. A simple model of the kind:
assumes that the \(\beta_1\), the increment that we observe in mpg when horsepower increments by one unit is constant even when other variables change their values. However, we can imagine how, for light vehicles horsepower affects mpg in a way, while for heavy vehicles horsepower affects mpg in a different way. For example, we expect light vehicle with big horsepower to be more efficient than heavy vehicles with small horsepower. To account for this, we could consider the following model instead:
Note that the model above is nonlinear in \(horsepower\) and \(weight\), but it is still linear if we introduce a variable \(hw = horsepower \times weight\). We can easily do this by adding a new column to our design matrix computed as the product of the two variables. Then we can fit the model using the same exact estimators seen before.
This new regressor obtained \(R^2=0.748\), which is larger as compared to \(R^2=0.706\) obtained for the \(mpg = \beta_0 + \beta_1 horsepower + \beta_2 weight\) regressor. Both regressor have a large F-statistic and an associated p-value close to zero. The new regressor explains more variance than the previous one.
The estimated coefficients are:
data.columns
Index(['displacement', 'cylinders', 'horsepower', 'weight', 'acceleration',
'model_year', 'origin', 'mpg'],
dtype='object')
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| Intercept | 63.5579 | 2.343 | 27.127 | 0.000 | 58.951 | 68.164 |
| horsepower | -0.2508 | 0.027 | -9.195 | 0.000 | -0.304 | -0.197 |
| weight | -0.0108 | 0.001 | -13.921 | 0.000 | -0.012 | -0.009 |
| horsepower:weight | 5.355e-05 | 6.65e-06 | 8.054 | 0.000 | 4.05e-05 | 6.66e-05 |
Let’s compare these with the ones obtained for the \(mpg = \beta_0 + \beta_1 horsepower + \beta_2 weight\) regressor:
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| Intercept | 45.6402 | 0.793 | 57.540 | 0.000 | 44.081 | 47.200 |
| horsepower | -0.0473 | 0.011 | -4.267 | 0.000 | -0.069 | -0.026 |
| weight | -0.0058 | 0.001 | -11.535 | 0.000 | -0.007 | -0.005 |
We can note that:
The p-value of the product \(horsepower \times weight\) is almost zero. This is a strong evidence that the true relationship is not merely additive, but an interaction between the two variables actually happens.
The coefficients of
horsepowerandweighthave changed. This makes sense, also their interpretation has changed. For instance, in the new regressor an increase of one unit ofhorsepoweris associated to an decrease of \(0.2508\) units ofmpgif the product betweenhorsepowerandweightdoes not change, i.e., if the way the two quantities interact does not change.
How should we interpret the coefficient \(\beta_3\)? Let’s rewrite our model:
as follows:
Hence we can see \(\beta_3\) as the increase in the coefficient of horsepower when weight increases by one unit. In the example above \(\beta_3\) is very small, this is due to the fact that weight is measured in pounds, so increasing the weight by one pound has a very small effect. It easy to see that, an increase in weight by \(1000\) pounds increases the coefficient of \(horsepower\) by \(1000 \beta_3 \approx = 0.05\). This is a relevant increase, considering that the coefficient of \(horsepower\) is \(-0.2508\). Hence, when we see an increase in weight of \(1000\) units, the coefficient of horsepower will be larger, meaning that in heavier cars, large horsepower will let mpg decrease more gently.
Let us consider the computed coefficients again:
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| Intercept | 63.5579 | 2.343 | 27.127 | 0.000 | 58.951 | 68.164 |
| horsepower | -0.2508 | 0.027 | -9.195 | 0.000 | -0.304 | -0.197 |
| weight | -0.0108 | 0.001 | -13.921 | 0.000 | -0.012 | -0.009 |
| horsepower:weight | 5.355e-05 | 6.65e-06 | 8.054 | 0.000 | 4.05e-05 | 6.66e-05 |
We can interpret the results as follows:
Intercept: the value of
mpgis \(63.5579\) whenhorsepower=0andweight=0(also their product will be zero);horsepower: an increase of one unit corresponds to a decrement of \(-0.2508\) in
mpgprovided thatweightis held constant and the wayweightinfluenceshorsepowerdoes not change. Note that, if we change the value ofhorsepowerand keepweightconstant, the interaction term will change. Here we assume that, even if the ratio change, we assume that the wayweightaffectshorsepowerdoes not change.weight: an increase of one unit corresponds to a decrement of \(-0.0108\) in
mpgprovided thathorsepoweris held constant and the wayhorsepoweraffectsweightdoes not change.horsepower:weight: an increase in one unit of
weightincreases the coefficient regulating the effect ofhorsepoweronmpgby \(5.05e-5\).
10.6.2. Non-linear Relationships: Quadratic and Polynomial Regression#
In many cases, the relationship between two variables is not linear. Let’s visualize the scatterplot between \(X\) and \(Y\):
This relationship does not look linear. It looks instead as a quadratic, which would be fit by the following model:
Again, the model above is nonlinear in horsepower, but we can still fit it with a linear regressor if we add a new variable \(z=horsepower\).
The fit model will obtain \(R^2=0.688\), larger than \(R^2=608\) obtained by the base model (\(mpg = \beta_0 + \beta_1 horsepower\)). Both have a large F-statistic.
The estimated coefficients are:
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| Intercept | 56.9001 | 1.800 | 31.604 | 0.000 | 53.360 | 60.440 |
| horsepower | -0.4662 | 0.031 | -14.978 | 0.000 | -0.527 | -0.405 |
| I(horsepower ** 2) | 0.0012 | 0.000 | 10.080 | 0.000 | 0.001 | 0.001 |
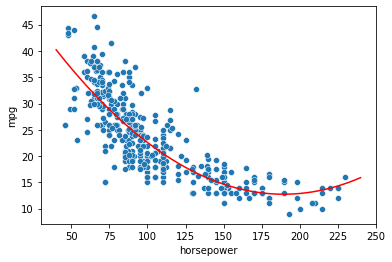
The coefficients now describe the quadratic:
If we plot it on the data, we obtain the following:
In general, we can fit a polynomial model to the data, choosing a suitable degree \(d\). For instance, for \(d=4\) we have:
which identifies the following fit:
This approach is known as polynomial regression and allows to turn the linear regression into a nonlinear model. Note that, when we have more variables, polynomial regression also includes interaction terms. For instance, the linear model:
becomes the following polynomial model of degree \(2\):
As usual, we only have to add new variables for the squared and interaction term and solve the problem as a linear regression one. This is easily handled by libraries. Note that, as the number of variables increases, the number of terms to add for a given degree also increases.
10.7. Residual Plots and Residual Q-Q Plots#
Residual plots are a way to diagnose if the linear model we are fitting on the data actually describes the relationship between the variables. For instance, if the relationship is not linear, and we try to force a linear model, the model will not be accurate.
If the relation is accurate, we expect the residuals of the model (i.e., the \(e_i=\hat y_i - y_i\) terms) to be random and approximately Gaussian.
To check if the residuals are random, it is common to show a residual plot, which plots the residuals on the \(y\) axis and the true \(y\) values on the y axis. We expect to observe a cloud of points centered around the zero with no specific patters.
To check if the residuals are Gaussian, we can show Q-Q plots
The graph below compares residual plots and Q-Q Plots of the residuals of different regression models:
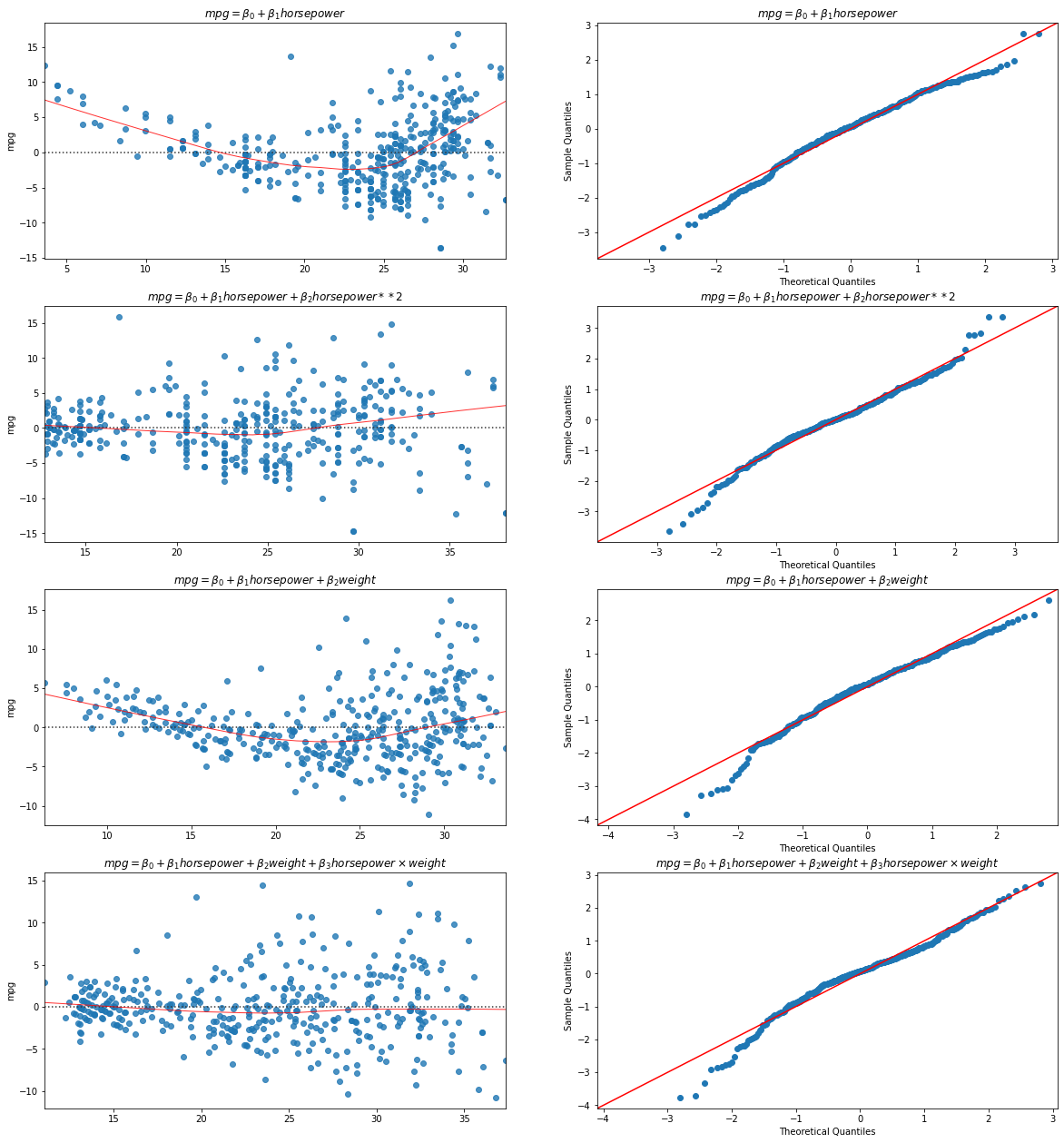
From the plot, we can see that some models have residuals less correlated with the predicted variable and quantiles closer to the normal distribution. This happens when the model explains better the variance of the predicted variable. In particular, we can note that the quadratic model (second row) and the one with the interaction term (last row) are a much better fit than the purely linear models (other two rows).
10.8. Collinearity and Regularization Techniques#
When fitting a multiple linear regressor, we should bear in mind that having two very correlated variables can lead to a poor model. For instance, in the case of perfectly correlated variables, two rows of the \(\mathbf{X}\) matrix will be linearly dependent (one can be computed as a linear function of the other), hence the determinant of \(\mathbf{X}^T\mathbf{X}\) will be zero, the matrix cannot be inverted, and the coefficients cannot be estimated.
Even if two variables are nearly collinear (strongly correlated), the \(\mathbf{X}^T\mathbf{X}\) matrix will be ill conditioned and the parameters will be estimated with high numerical imprecision.
In general, when there is collinearity between two variables (or even multicollinearity, involving more than two variables), the results of the multiple linear regressor cannot be trusted. In such cases, we can try to remove the correlated variables (we can identify correlated variables with the correlation matrix), apply regularization techniques (discussed later) or perform Principal Component Analysis (PCA), which aims to provide a set of decorrelated features from \(\mathbf{X}\). The PCA method will be presented later.
10.8.1. Ridge Regression#
One way to remove collinearity is to remove those variables which are highly correlated with other variables. This will effectively remove collinearity and solve the instability issues of linear regression. However, when there is a large number of predictors, this approach may not be very convenient. Also, it is not always clear which predictors to remove and which ones to keep, especially in the case of multicollinearity (sets of more than two variables which are highly correlated).
A “soft approach” would be to feed all variables to the model and encourage it to set some of the coefficients to zero. If we could do this, the model would effectively select which variables to exclude from the model, hence releasing us from making a hard decision.
This can be done by changing our cost function, the RSS. Recall that the RSS of linear regression (Ordinary Least Squares) can be written as:
where \(x_{ij}\) is the value of the \(x_j\) variable in the \(i^{th}\) observation.
We can write the cost function as follows:
In practice, we are adding the following term:
\(\sum_{j=1}^n \beta_j^2\)
weighted by a parameter \(\lambda\). The term above penalizes solutions with large values for the coefficients \(\beta_j\), hence encouraging the model to put some of the variables to zero, or close to zero. This term is called “regularization term” and a linear regressor fit by minimizing this new cost function is called a ridge regressor.
The cost function has a parameter \(\lambda\) which must be set as a constant. These kinds of parameters which we need to specify manually and are not computed from the data, are called hyperparameters. In practice, \(\lambda\) controls how much we want to regularize the linear regressor. The higher the value of \(\lambda\), the stronger the regularization will be, hence encouraging the model to select small values of \(\beta_j\) or set some of them to zero.
To avoid \(\lambda\) having different effects depending on the unit measures of the given variables, it is common to z-score all variables before computing a ridge regressor.
This is shown in the following plot, which shows the values of the parameters \(\beta_j\) when a ridge regression model is fit with different values of \(\lambda\):
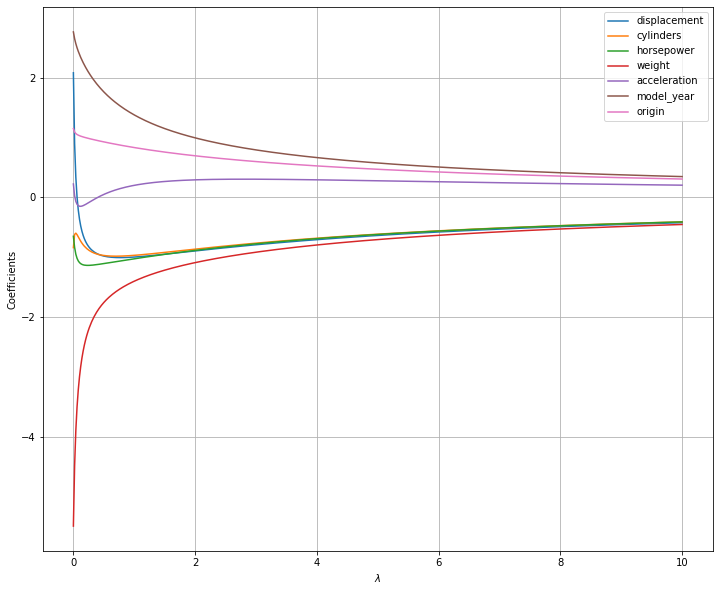
As can be seen, the coefficient values are gradually shrunk towards zero as the value of \(\lambda\) increases. Interestingly, the model “decides” which coefficients to shrink. For instance, for low values of \(\lambda\), weight is shrunk, while acceleration is first shrunk, then allowed to be larger than zero. This is due to the fact that, the regularization term acts as a sort of “soft constraint” encouraging the model to find smaller weights, while still finding a good solution.
It can be shown (but we will not see it formally), that ridge regression reduces the variance of coefficient estimates. At the same time, the bias is increased. So, finding a good value of \(\lambda\) allows to control the bias-variance trade-off.
10.8.1.1. Interpretation of the ridge regression coefficients#
Let us compare the parameters obtained through a ridge regressor with those obtained with a linear regressor (OLS):
| ridge_params | ols_params | |
|---|---|---|
| variables | ||
| displacement | -0.998445 | 2.079303 |
| cylinders | -0.969852 | -0.840519 |
| horsepower | -1.027231 | -0.651636 |
| weight | -1.401530 | -5.492050 |
| acceleration | 0.199621 | 0.222014 |
| model_year | 1.375600 | 2.762119 |
| origin | 0.830411 | 1.147316 |
As we can see, the ridge parameters has a smaller scale. This is due to the regularization term. As a result, the parameters cannot be interpreted statistically as the ones of a linear regressor. Instead, we can interpret them as denoting the relative importance of the variable to the prediction.
10.8.2. Lasso Regression#
The ridge regressor will in general set coefficients exactly to zero only for very large values of \(\lambda\). An alternative model which has been shown to set coefficients more likely to zero is the lasso regressor. The main difference with ridge regression is in the regularization term. The new cost function of a lasso regressor is as follows:
We basically replaced the norm of the coefficients with the absolute values (this is called an L1 norm), which has the effect to encourage the model to set values to zero.
The figure below shows how the coefficient estimates change for different values of \(\lambda\):
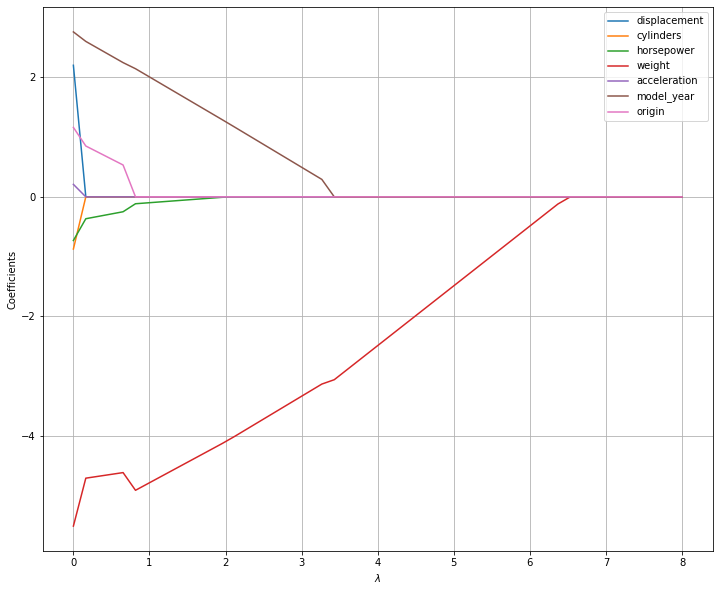
As can be seen, the model now makes “hard choices” on whether a value should be set to zero or not, thus performing variable selection.
10.9. References#
Chapter 3 of [1]
Parts of chapter 11 of [2]
[1] Heumann, Christian, and Michael Schomaker Shalabh. Introduction to statistics and data analysis. Springer International Publishing Switzerland, 2016.
[2] James, Gareth Gareth Michael. An introduction to statistical learning: with applications in Python, 2023.https://www.statlearning.com